

インストール作業はすべて終了し、いよいよT10Jの設定・調整作業に入ります。手順としては以下の様になります。(実のところ、ここに至るまでに試行錯誤の連続でして思いの外てこずりました)
- Lightbridge Assistant S/Wのインストール
- LightbridgeファームウエアのUpdate(地上側&機体側)
- T10Jプロポチャンネル割り当て(IOS、ジンバルTilt、GPS/ATTI)→一部修正しました。
- スティックキャリブレーションの実行(Lightbridge地上側)
- スティックキャリブレーションの実行(Phantom2本体)
- T10Jプロポチャネルエンドポイント設定
1.Lightbridge Assistant S/Wのインストール
DJIからリリースされているLighbridge Assistant Software v1.3をダウンロード、インストールします。尚、同じ画面にあるDJI WIN Driver Installerは他のアシスタントS/Wと共通なので既にPhantom2本体用のアシスタントS/Wインストール時にDriverをインストールしてあれば今回は不要です。
2.LightbridgeファームウエアのUpdate
事前に①プロポ、②Lightbridge(地上側)、③Phantom2本体の順番で電源を入れておき、USBケーブルでパソコンとLightbridge(地上側)を接続します、そしてPC上のLightbridgeAssistantS/Wを起動します。(最初の起動時のみユーザ登録してあるメールアドレスとパスワードがプロンプトされます。)
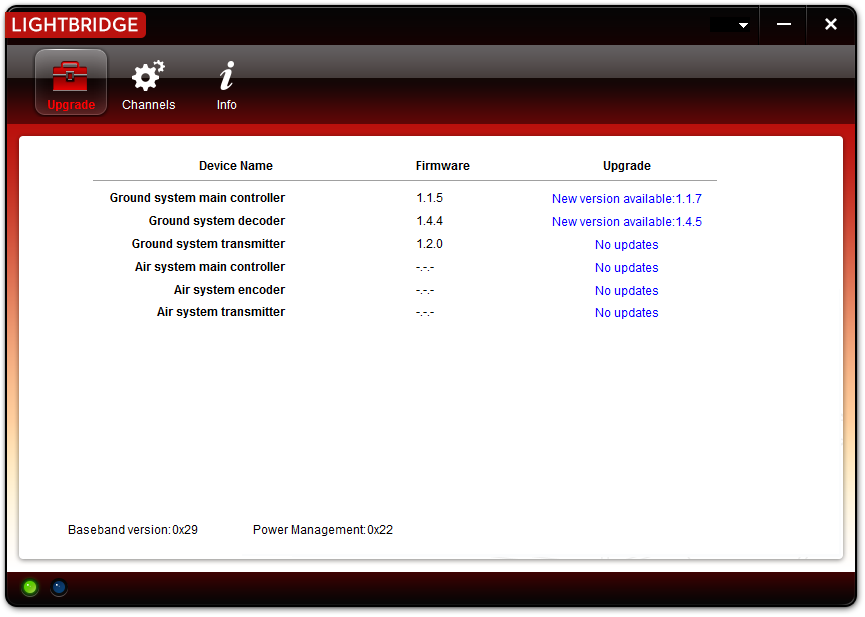 以下の様にファームウェアのバージョン情報が表示されるので地上側、機体側それぞれを最新版にUpdateしておきます。地上側、機体側それぞれ個々にUSB入力を持っているのでUpdateもUSBを個別に接続する必要があります。
以下の様にファームウェアのバージョン情報が表示されるので地上側、機体側それぞれを最新版にUpdateしておきます。地上側、機体側それぞれ個々にUSB入力を持っているのでUpdateもUSBを個別に接続する必要があります。
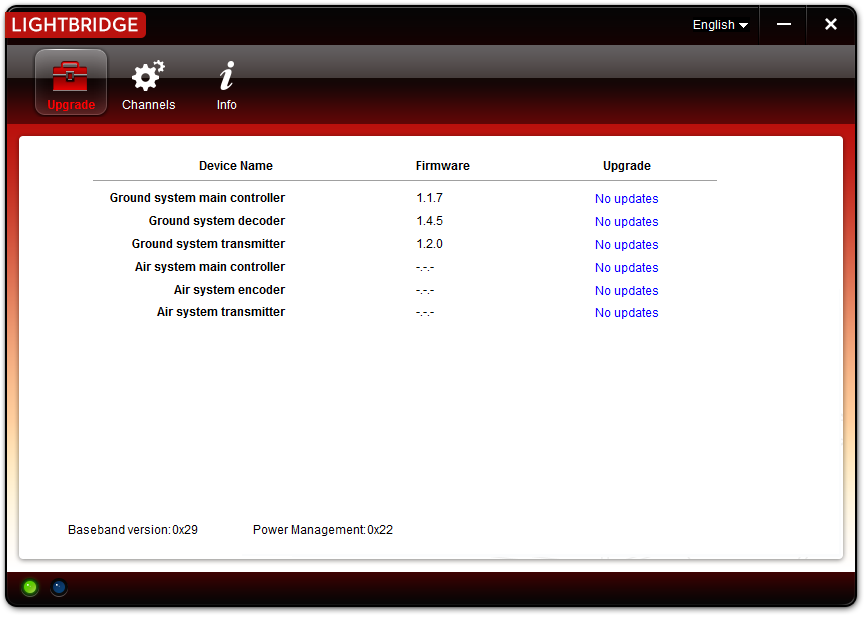 地上側の最新状態です。全部で3本のファームウェアUpdateが必要ですが、特に2行目のGroundSystemDecoderはそこそこ時間がかかりました電池の残量等に気を付けた方が良いです。(時間計測し忘れました、感覚的ですが7-8分ぐらいでした)
地上側の最新状態です。全部で3本のファームウェアUpdateが必要ですが、特に2行目のGroundSystemDecoderはそこそこ時間がかかりました電池の残量等に気を付けた方が良いです。(時間計測し忘れました、感覚的ですが7-8分ぐらいでした)
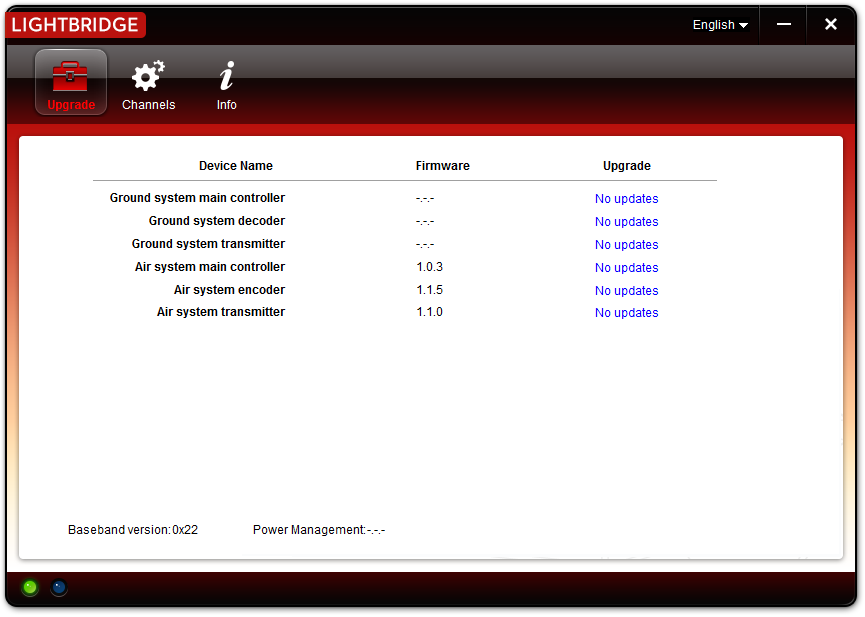 続いて機体側のUpdate結果です。こちらも全部で3本のファームウェアUpdateが必要です、同様に2行目のAirSystemEncoderはUpdateに時間がかかりますがGroundSystemDecoderほどではないです。
続いて機体側のUpdate結果です。こちらも全部で3本のファームウェアUpdateが必要です、同様に2行目のAirSystemEncoderはUpdateに時間がかかりますがGroundSystemDecoderほどではないです。
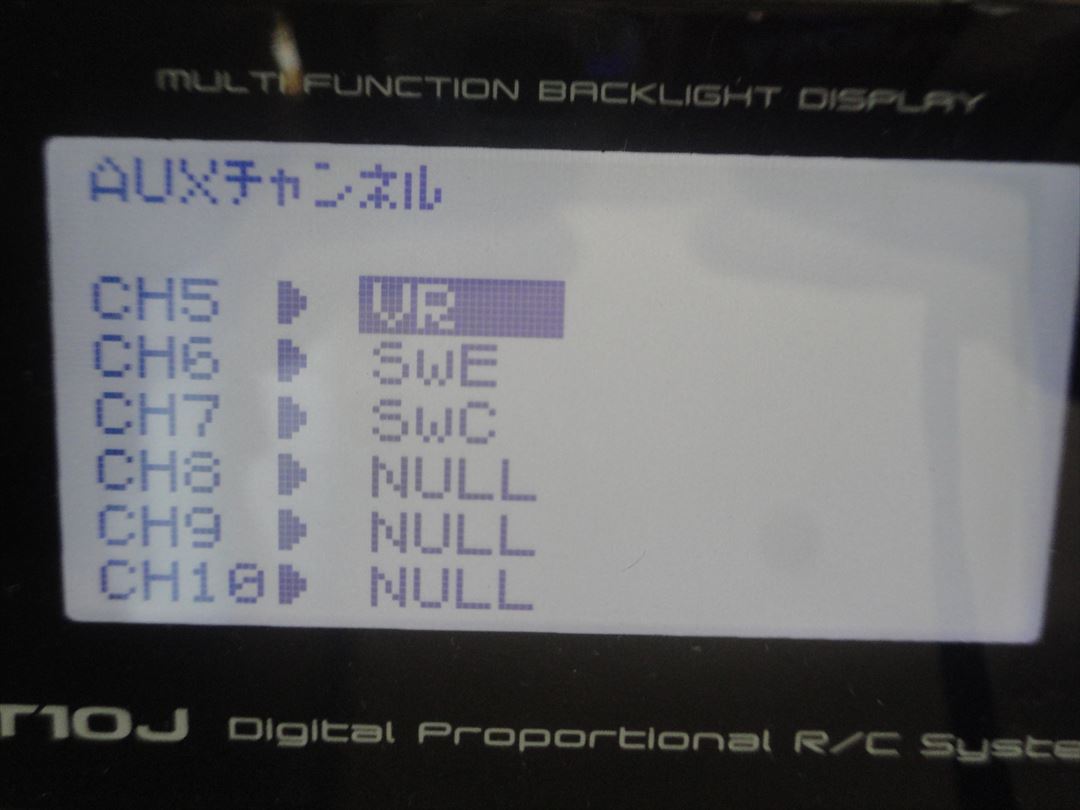
3.T10Jプロポチャンネル割り当て(IOC/Tilt/GPS)
機体制御以外の制御信号のチャンネル割り当てを実行します。
1)IOC機能選択(Off/CL/HL選択)—Ch.6
Phantom専用送信機の左上にあるIOC選択Swのことで、Phantom2ではこの制御にCh.6を割有当ててるようようです、T10JのSw.E(3点Sw)をCh.6に割り当てます、更にリバースをオンにすることでSw上:IOCオフ、Sw中:CL、Sw下:HLに設定されます
2)GimbalTilt制御—Ch.5
Phantom2ではジンバルのチルト制御にCh.5を割り当てているのでT10JのVRをそれに割り当てます。
3)GPS/ATTI/FailSafe選択—Ch.7
Phantom2ではCh.7を割り当てているのでT10JのSw.C(3点Sw)をCh.7に割り当てます、更にリバースをオンにすることでSw上:GPS、Sw中:ATTI、Sw下:FailSafeに設定されます。
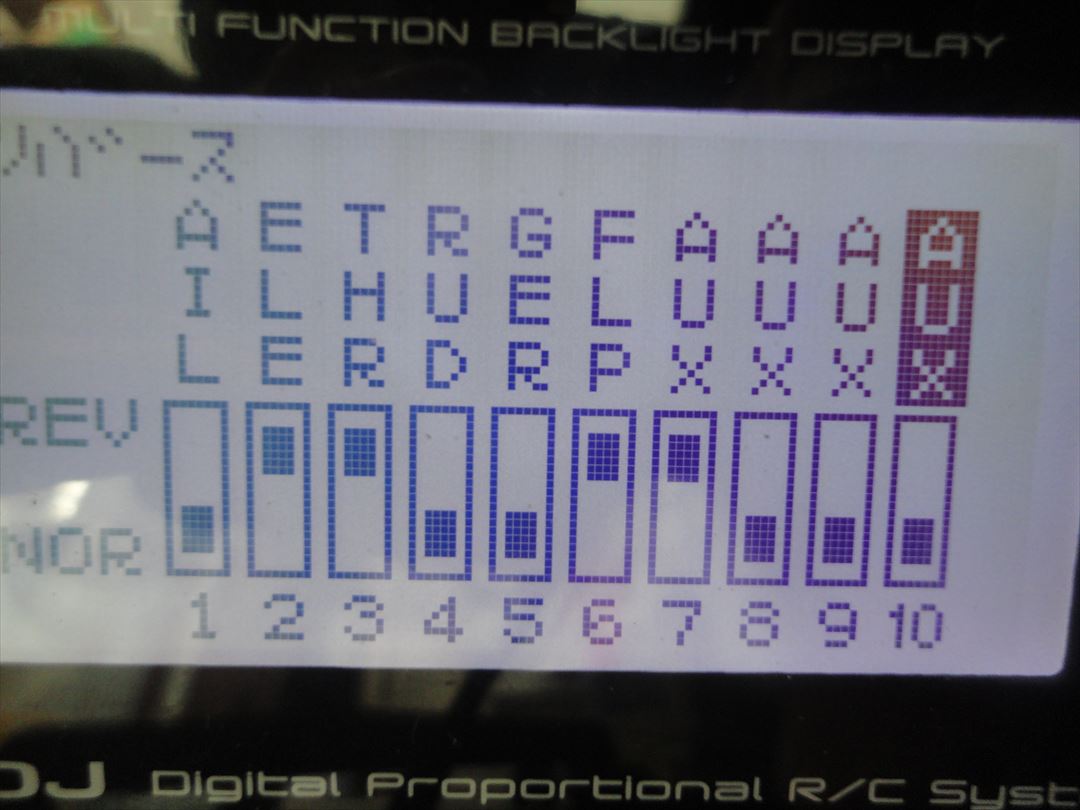
 この設定は今は使ってません。
この設定は今は使ってません。
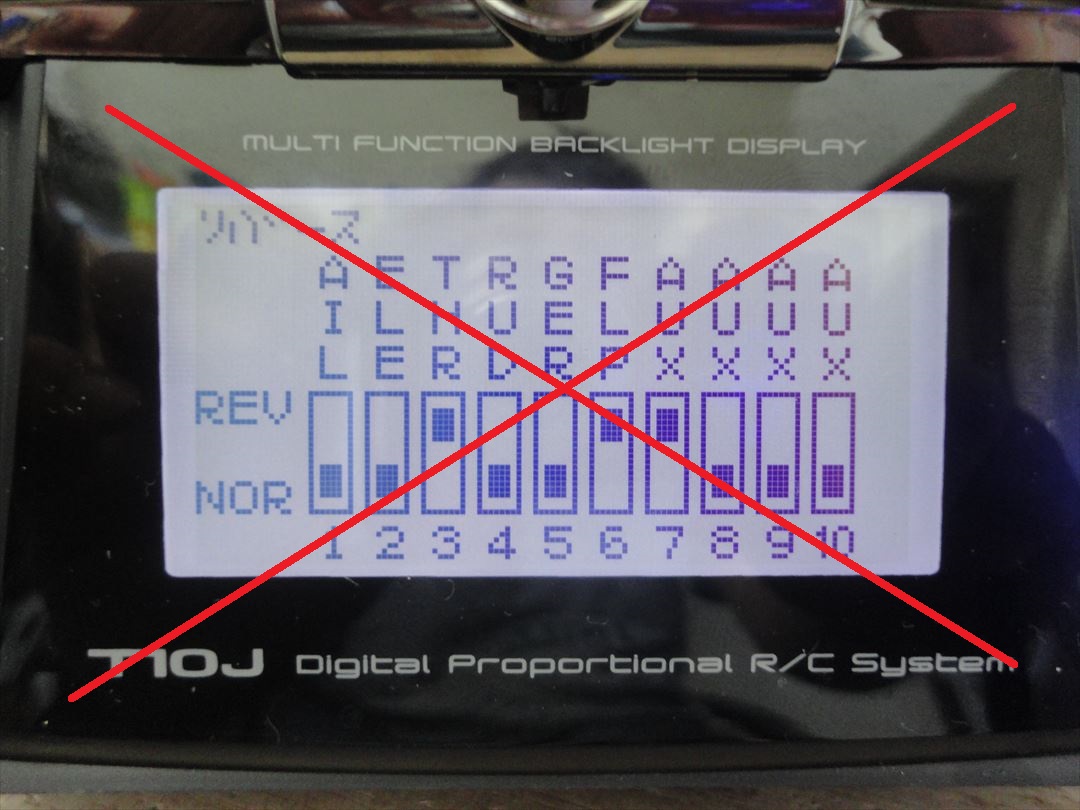
 エレベータチャンネルにもリバースを掛けたので今はこの状態です。
エレベータチャンネルにもリバースを掛けたので今はこの状態です。
T10Jでの設定画面です。
4.スティックキャリブレーションの実行(Lightbridge地上側)
Lightbridge機体側とPCをUSB接続しLightbridgeAssistantS/Wを起動します。
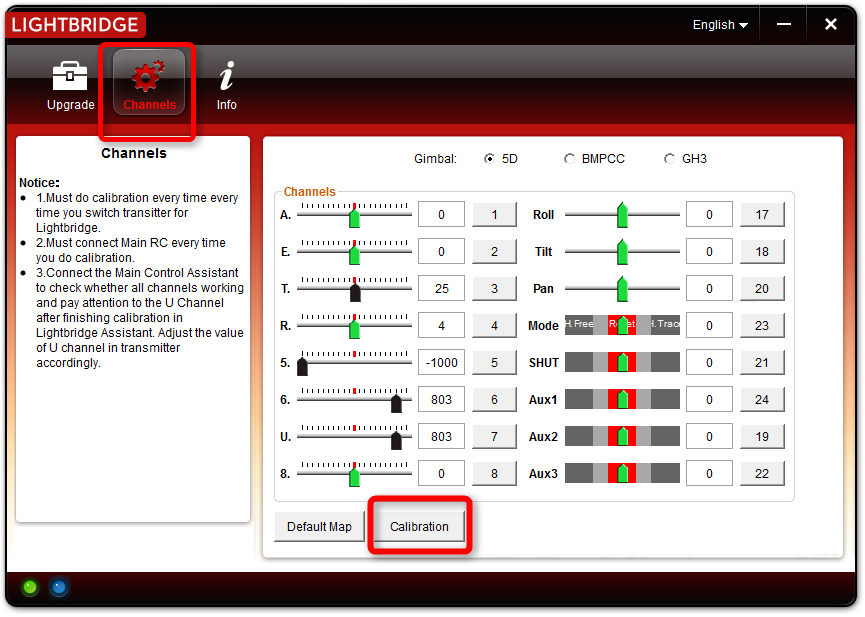 画面上部にある「Channels」ボタンをクリックすると各チャンネルのマッピング画面になるので下の方にあるCalibrationをクリックしてキャリブレーション実行です、クリック後は画面指示に従えばOKです。
画面上部にある「Channels」ボタンをクリックすると各チャンネルのマッピング画面になるので下の方にあるCalibrationをクリックしてキャリブレーション実行です、クリック後は画面指示に従えばOKです。
キャリブレーション後はスティックの最大振れ幅で-1000~1000に値が振れればOKです。
キャリブレーションは2本のステックだけでなく、Ch.5~Ch.7に割り当てたVR、SwC、SwEも実施しました。(しかしながらSwCとSwEが正しく機能するにはこれだけではだめで、エンドポイントの調整も必要でした。)
5.スティックキャリブレーションの実行(Phantom2本体)
この処理は、本当に必要なのかどうかは不明なのですが念のため実施しました。
LightbridgeAssistantS/WではなくPhantomAssistantS/Wを使用します、USBケーブルもPCとPhantom2本体間を接続します。
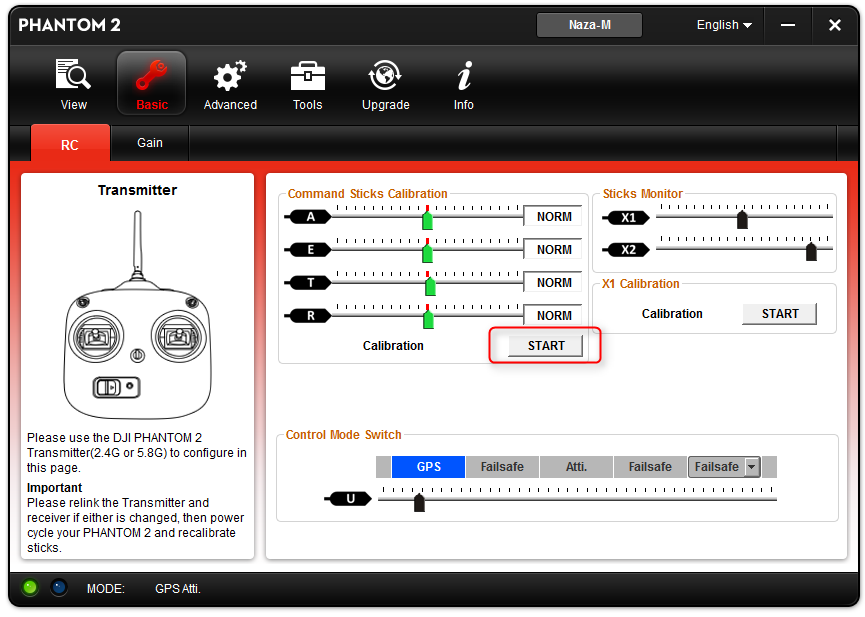 この画面で、StartをクリックしてCalibration処理開始です。
この画面で、StartをクリックしてCalibration処理開始です。
6.T10Jプロポチャネルエンドポイント設定
Sw.C(GPS/ATTI/FailSafe選択)とSw.E(IOC機能選択)の2つのチャンネルについてはキャリブレーションだけではうまく制御できなくてプロポのエンドポイント調整が必要でした。
エンドポイント量の調整はPhantomAssistantS/Wで各Swの効き量を見ながら決めました。
1)Ch.6エンドポイント調整
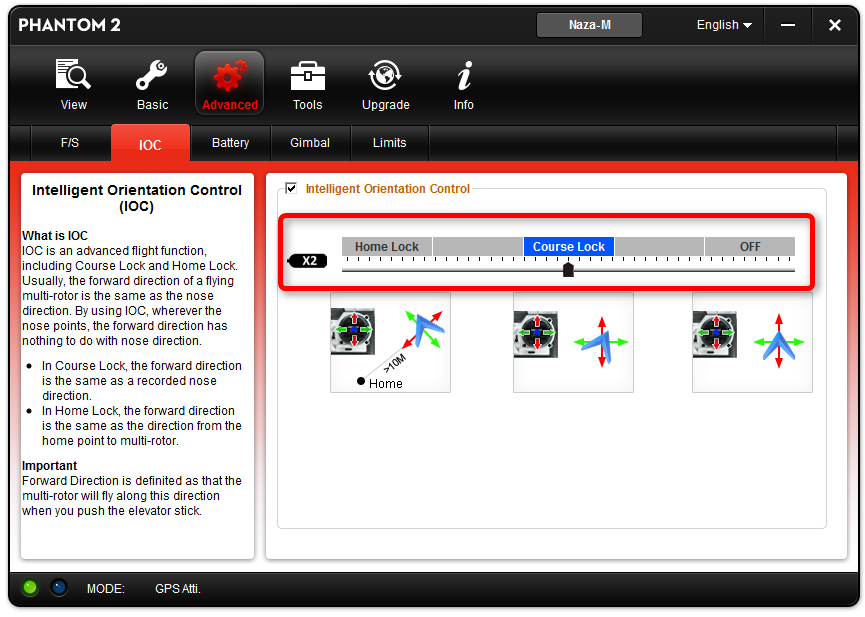 赤枠内のポインタがOff/CourseLock/HomeLockの各領域に入るようにSw.Eを動作させながらプロポのエンドポイント調整する。
赤枠内のポインタがOff/CourseLock/HomeLockの各領域に入るようにSw.Eを動作させながらプロポのエンドポイント調整する。
2)Ch.7エンドポイント調整
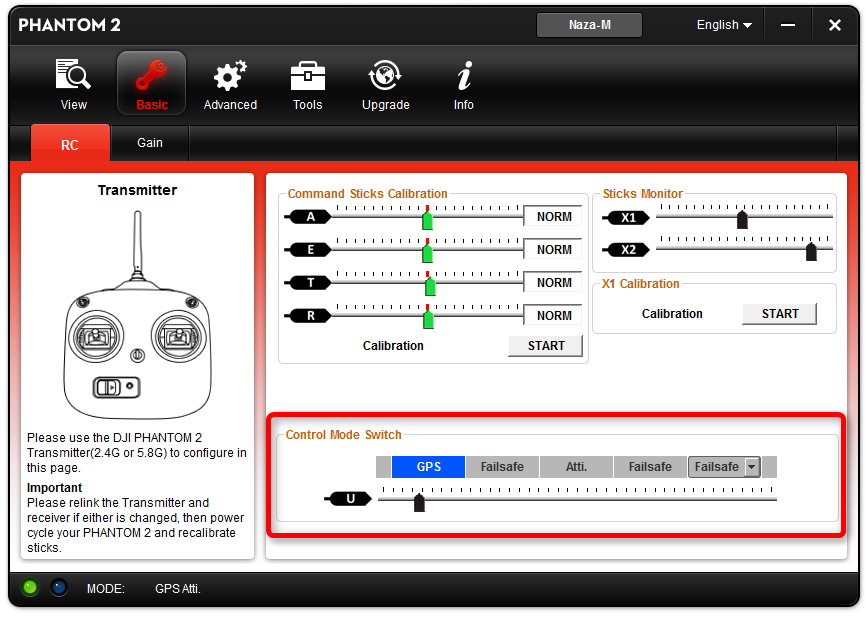 赤枠内のポインタがGPS/ATTI/FailSafeの各j領域に入るようにSw.Cを動作させながらエンドポイント調整する。
赤枠内のポインタがGPS/ATTI/FailSafeの各j領域に入るようにSw.Cを動作させながらエンドポイント調整する。
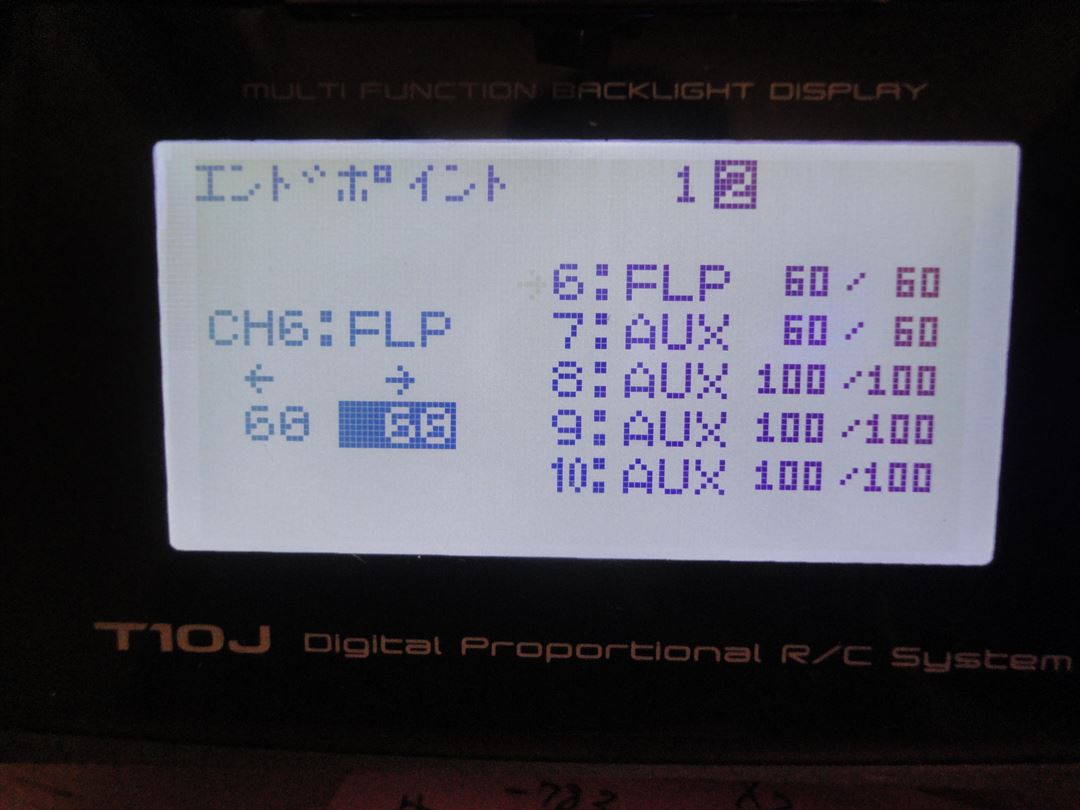
最終的には以下の値(60%)に設定しました。
以上で設定終了なんですが、未解決な問題が2件あります。
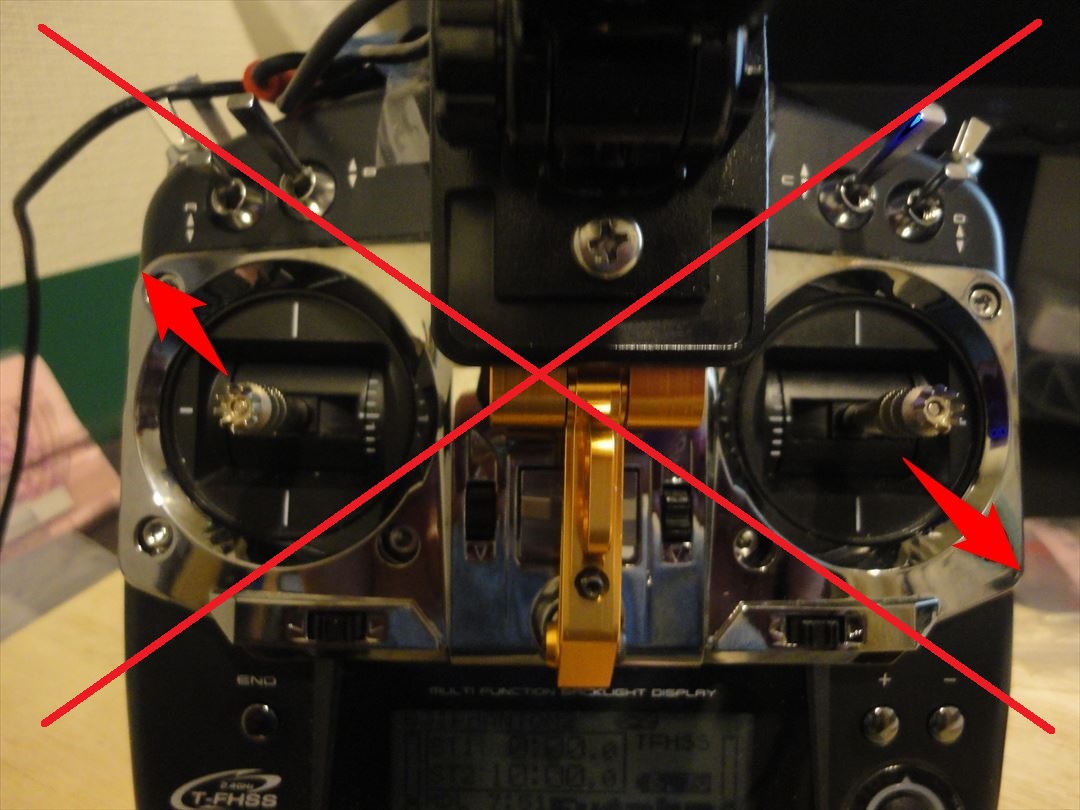
①モータ・アーミングするためのプロポスティックが以下の方向のみである。他の方向はすべてアーミングしない。→解決しました。(エレベータチャンネルが逆動作でしたのでリバースをかけました、その結果この問題もクリア)
②ラダー操作でジンバルがパン動作(左右首振り)する。
この2点については継続して調査するつもりであるが解決するかどうか今のところ自信なしである。
こんにちは
T10Jでスロットルを下マックスで保持しているとP2はモーター停止してしまうそうですが、これをそうならないように設定する方法はないのでしょうか?
こんにちは、ご質問の設定はやったことないのでわからないのですが、(1)スロットルカーブが調整できるのでスティックの最下ポジションでの%を停まらない程度に上げる。(2)そうると着陸後のモーター停止ができなくなるのでスロットルカット機能をスイッチでオンオフ切替可能にして本当にモーター停めたい時はスイッチでカット機能をオンにさせればよいかなあとは思うのですが、やったことないのでできるかどうか検証が必要ですね、今度時間がある時にでも実機で試してみます。
ありがとうございます。やはりそうですよね。
リミット設ければいいだけではと私も思いました。
プロポの機種によってはそういうことができないのも
あるのかもしれません。DJI純正は最初から半固定抵抗
が低品質で、最近キャリブレーションエラーでとべなくなる
ことが増えてきたので飛行中の事故になるまえにかえて
しまおうと思うようになりました。
持っていないのでよくわからなかったのですが、
すっきりしました。ありがとうございます。
だいぶ時間が経っちゃいましたが、実機でやってみました。結果を記事にアップ(http://wp.me/p51c8H-cD)
DJI PHANTOM 2、
3軸ジンバルZenmuse H3‐3D + GOPRO HERO 4(Silver Edition)、
DJI Lightbridge 2.4G Full HD Digital Video Downlink、
T10J(セルフニュートラル仕様)
を購入し、T10Jの設定で四苦八苦している時に、ここのHPを参考に設定させていただきました(非常に参考になりました)。
本日T10Jプロポでのテスト飛行を行い、操縦に関しては問題なくクリアしました。
気になっているのはカメラのチルト制御で、純正プロポの時はアプリのDJI Phantom 2 Vision Assistantにてアドバンス→ジンバルにてチルト制御ゲインを50→2に変更し、ゆっくりチルトする様に設定して使っていましたが、T10Jに変更してから、チルト制御ゲインの設定に関係なく回した量に応じて遅⇔早にチルトします。
当方としては、純正プロポの様にVRを回す量で角度が調整できるのと、チルト制御ゲインのスピード設定を使いたいのですが、
マニュアルを読んでもVRに関する詳しく内容が書かれていない為、ほぼお手上げ状態です(またVRをセンターに戻さないと、チルトが止まらないのも慣れません…)
VRの制御に関して何かご存知でしょうか?
後、現時点での当方のトラブル状況ですが、GoProHero3→GoProHero4へ変更した際、ジンバルについているUSB給電を接続すると、録画されない不具合が出ているため、バッテリーからの給電が受けられない状態です(同じような症状の方はいるみたいです…対策が出ると良いのですが….)。
またT10JにしてからGoHomeのチェックをしていない為、どうなるか分かりません(ちょっと不安です)。これって純正プロポの時の様にプロポの電源を切ったらGoHomeモードになるのかな?
ただ、T10Jの場合、プロポの電源を切ると、電源を入れなおした際「パワーモード」→「OFF」にする作業がでるので、まだ実験していません(Lightbridgeのコントローラーに接続されているピンジャックを抜いたほうが早いかな!?)。
こんばんは、jiroさん
記事がお役に立って何よりです。(ホント、ブログ記事作成の励みになります)
早速ですが、チルト制御ゲインの件ですがこの部分は触ったことが無いので即効の情報は残念ですが有りませんです。(お役に立てなくてスミマセン)
ならば実機で調べようと思ったんですが、実は管理人のPhantom2のLightbridge搭載機は知り合いのところに行ったきり状態でして、手持ちのPhantom2は普通のPhantom2にT10J+R3008SBなんです。しかもLightbridge搭載機は暫く返ってくる様子無しです。
とりあえず、Lightbridge未搭載機+T10Jでチルト制御がどうなるかを調べてみようかと思います。(2-3日お待ちください)
あと、GoHomeの件ですが、確かGoHome発動条件は(1)プロポスイッチからの起動、(2)送信信号ロスト。なのでLightbridge搭載だと電波はLightbridgeのGrandStationから送信されているのでT10J電源オフ(またはピンジャック抜去)ですとPPM信号が行かなくなるだけで電波は送信されたままなのでGoHomeは発動されないかもしれません。但し、Phantom2本体側でPPM信号未検出で送信信号ロストと判定していればGoHome発動となりますが要検証ですね。
GoHome発動確認はフライトさせなくても地上でも可能かと思います。Phantom2本体LED(アーム)の点滅状態が緑色点滅から黄色点滅に変わったような記憶有りです。(4本アームの2本のLED列)
他の件でもご質問等あれば何なりと聞いてください。
ではまた。
こんにちは、jiroさん

ジンバルのチルト制御の件、手持ちのPhantom2(Lightbridge未搭載、T10J+R3008SB)でやってみました。Phantom2AssitantS/Wを接続して「アドバンス」⇒「ジンバル」⇒「チルト制御ゲイン」をデフォルトの「50」から「2」に下げてT10JのVRを回してみました。
チルト動作の動きは追従速度が遅くなった感じになりました。純正プロポではこの設定やったことないのでこの動きが正常か否かわからないのですが、見た目にはOKそうなんですけどね。
動画もYouTubeにアップしました。
http://youtu.be/v3F9_P-E33Y
ところで、いまさらなんですが、jiroさんが言われてる「T10Jに変更してから、チルト制御ゲインの設定に関係なく回した量に応じて遅⇔早にチルトします。」はどんな動作なんでしょうか。
参考までに当方のPhantom2のファームバージョンです。(動画撮影時)

お役に立てない気もしますが、とりあえずレポします。
返信ありがとう御座いました。
動画の方もアップして頂き、有り難うございます。
動画を見ると、まさしく純正プロポと同じ動きです!!。というか、この動きになって欲しい!なるものだと思っていましたが、当方のは違っています。
言葉で説明するのが難しいので、当方も動画にしてアップしてみましたのでご確認下さい。新・旧Phantom2の起動音の違いやGo Homeの確認など色々混ざっていますが、VRの動きも後半にありますので、それを見れば分かるかと思います。
ちなみに、以前質問しました、Go Homeに関してですが、結論的にはGo Homeモードに移行する事が確認できました。
動画のURLを書き忘れました。
https://www.youtube.com/watch?v=HHFtdtPmfWY
またまた書き忘れがありました(すみません)。
チルト制御ゲインの設定は当方と同じ状態です。
またPhantom2のファームバージョンも同じでした。
jiroさん
こんにちは、URL連絡の再コメントありがとうございます、動画問題なく見れてます。(アップしていただいたYouTubeの方が限定公開だったので、URL記述されているコメントの承認は控えてます。)
そちらのT10JのVRの不具合状況良くわかりました。それにしても不思議な動作しますね、いったい原因はなんでしょうかね、いずれにしてもLightbridgeが要因の一つなんだとは思いますが....。ただ、自分のLightbridge搭載機(T10Jの組み合わせ)でもTilt機能は良く使ってましたが、このような動作をした記憶は無いですねぇ。但し、チルト制御ゲインは触ってないのでデフォルトの50のままだったと思います。⇒そちらのPhantom2も50に戻せば純正と同じ動作になるんでしょうか?
もし、lightbridge搭載機が戻ってくることがあれあ見てみたいと思いますが今のところその予定もあまりないのであまり期待しないでください。(スミマセンです)
話は変わりますが、Nexus7のプロポ搭載も動画に出てましたが、こじんまりとまとまってていいですね。それとGoHomeの件、動画でも見ました、うまく行ったようでよかったです。全体的に綺麗に撮れているのが印象的でした。
他に、何かこちらで調べることがあれば言って下さい。と言ってもLightbridgeは今のところ手元にないのでそれ以外のところになってしまいますが。
以上
動画URLが限定公開になっていたんですね(公開状態にしていると勘違いしていました:現在は限定→公開にしてあります)。
チルトの数値をデフォルトに戻しても、何に変更しても状況に変化ありません。
ちなみに新Phantom2では純正プロポで動かしていなかったので、一度、Lightbridgeを外して、純正プロポを使ってみると、どうやら新Phantom2がそもそもの原因の様です!!。
チルト動作が旧Phantom2とは異なり、センターで停止になっています!!(なぜでしょう!!)
H3-3Dジンバルを旧Phantom2に乗せ変えて実験したところ、チルト制御は問題なく動くため、新Phantom2の問題だということが分かりました!!!。だからといって解決方法が分かったわけではありませんが…。
いろいろお騒がせして申し訳ありませんでした。
チルトの問題に関して、自己解決しました。
DJI Phantom 2 Vision Assistantにて基本→RCにて
送信機タイプが新バージョンになっていた為、不具合が発生しておりました。
この設定を旧バージョンにすると、問題が解決できました。
いろいろとご迷惑をおかけしました。
解決には時間がかかりましたが、Phantom2本体に原因があることが分かったので、集中して調べることができた事、またいろいろ参考になる情報を頂けたのが功を奏しました!。やっとこれで一安心です…。
ただ、本日DJI関連を販売しているサイトを見ると、Phantom2の最新型が出たみたいですね。純正プロポの裏にトレーナーポートが付いている!!!。2015年1月にジンバルセットを購入したばかりなのに、ちょっとショックです…。
コングラチュレーション!よかったです、こちらもこれで一安心です。
これで、フライト&空撮に専念できますね、お互いに頑張りましょう。
新製品の件、残念ですが、FutabaT10Jは他にも使えるので買ってて損はないと思います。
こちらは、ブログ記事をみればお判りの様に最近は自作マルチコプターにハマっててPhantom2の空撮にはご無沙汰してますが暖かくなったらまた活動再開のつもりです。
自作マルチも面白いですよ、コントローラがArduinoベースなのでマイコン作るのが好きな人にはうってつけです。
また何かあれば、遠慮なくどうぞ。
ではまた。