MultiWiiのAltHoldのPIDチューニングを以前実施して、その時に得られた値(P=6、I=0.025、D=50)で数回何度となくフライトをしてきましたが、いまいち納得がいきません。(前回のPIDチューニング記事)
というのは高度が安定している時はとてもいいのですが、時々大きな上下動に遭遇します。なんとなく気に入らないのでPID再チューニングをしました。
- P値(0~10):6⇒2に下げました、これで目標高度値に対する追従度が下がることになります。下げることで目に見えて上下動は良くなりました
- I値(0~0.25):0.025⇒0に下げました、高度ドリフト(長期的なもの)の効きが悪くなるとの話ですが、余り感じませんでした。それよりも0にしたことで上下動が減少した気がします。
- D値(0~100):50⇒40に下げました。これに関しては明確な向上は見られなかったのですが変えてみました。(なんとなくという感じです)
経緯を動画にまとめてみました。
再チューニングしてみて:
①Pの値をさげたのでAltHoldオン時のスロットル・スティックによるオーバーライドの効きが悪くなりました。(このことはMultiWiiWikiなどには書いてないのですが、自己の経験として得られたものです。)
なので上昇・下降する時は一時的にAltHoldオフ(Baroオフ)させて今はフライトさせてます。但し、Baroオフさせる時にスロットル・スティックをセンターにしておかないと急上昇とか急降下・墜落になるので要注意です。
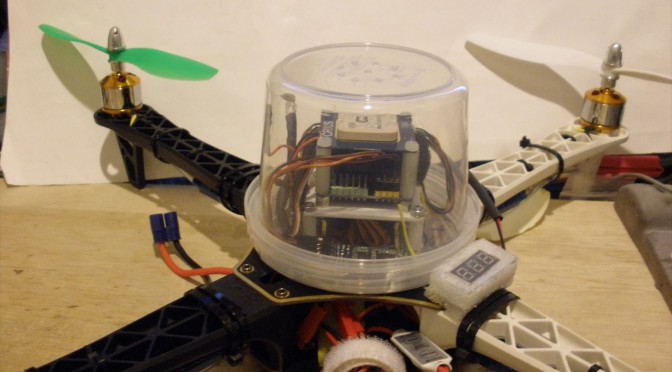
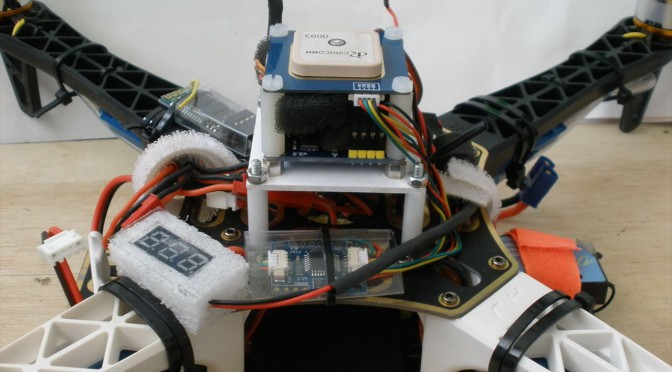
②AltHoldのPIDチューニング中に気になったのですが、そもそもこのフィードバック制御に用いている気圧計(Baroセンサー)の出力精度(ノイズも含めて)がどうなっているのか知りたくなりました。この出力がフラフラしているといくらPIDチューニングしても無意味ですし。


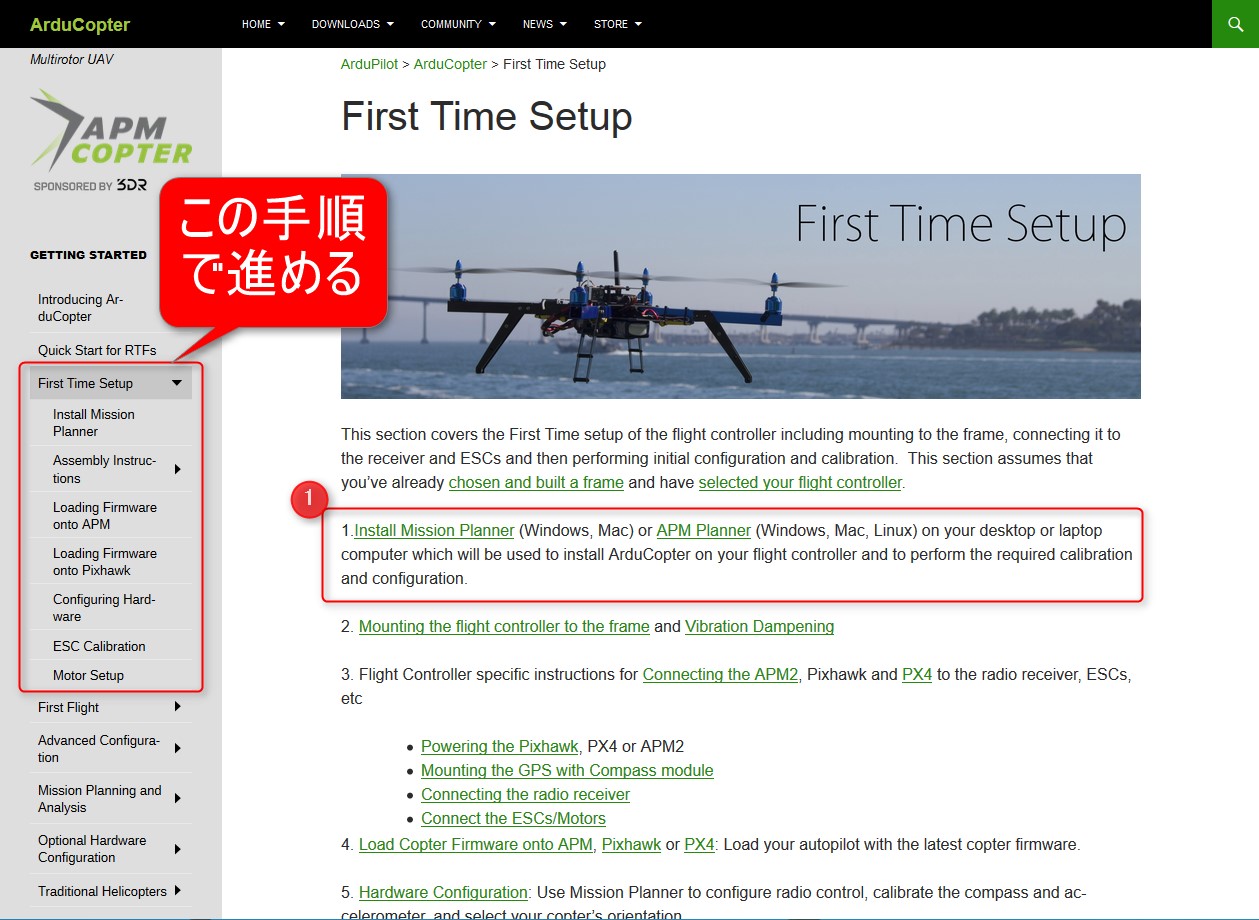 続きを読む X525 ArduCopter :組立編#2 ~MissionPlanner(Windows)をインストール~
続きを読む X525 ArduCopter :組立編#2 ~MissionPlanner(Windows)をインストール~