
前回、アラームブザーによるMAGセンサーへの干渉が大きいことを書きましたが、今回は続編でして、干渉元はモーター駆動電流です。
なんとかAltHoldが一段落したので以前から気になっていたGPSポジション・ホールドの「甘さ」を解決しようと手始めにMAGセンサー対策の続きをやりました。
GPSポジション・ホールドとMAGセンサー
GPSポジション・ホールド対策の情報を求め再度MultiWIiフォーラムを探し回りました。
ということで情報を求めて、毎度お世話になってるMultiWiiフォーラムを探し回りました、キーワード”GPS PosHold”で検索するとあるはあるはで探し当てるのは大変。
その中で、GPS制御のためにMAGセンサーは重要であるという意見が結構ありました、確かにMAGセンサーで機体の向いている方角を検出しているのでその値が正確でなければGPSで自機位置がわかっても、目標位置に向かうには舵をどのように制御すればいいのか判定できないですものね。
全Topicを見てませんが、中でもこのTopicでが興味深かったですね、内容を抜粋すると「機体をSouth方向で飛ばしたときだけGPSHoldがうまく行き、他の方角ではドリフト発生。最終的にはFCボードをセンターボードから離すことにより磁気センサー干渉をへらすことができてGPSHoldも全方角うまく行くようになった」との記事でした。
センターボードにはモータ駆動の大電流が流れるので大量の磁界を発生しているので磁気センサーへの影響は多大だと思います。
モーター駆動電流のMAGセンサー干渉
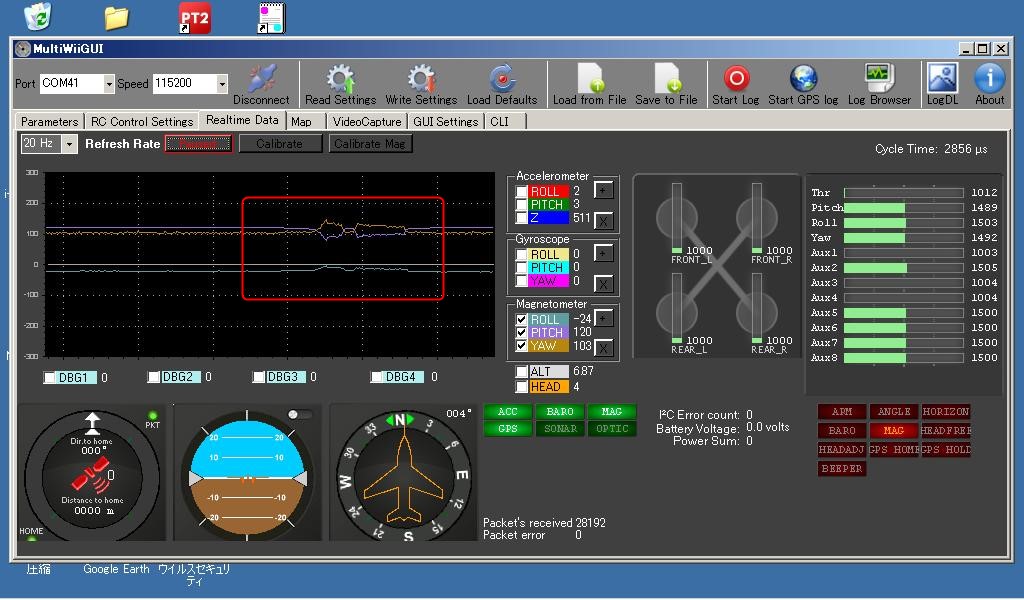
現状(FC基板位置変更前)でのWinGUIでの画面状態です。
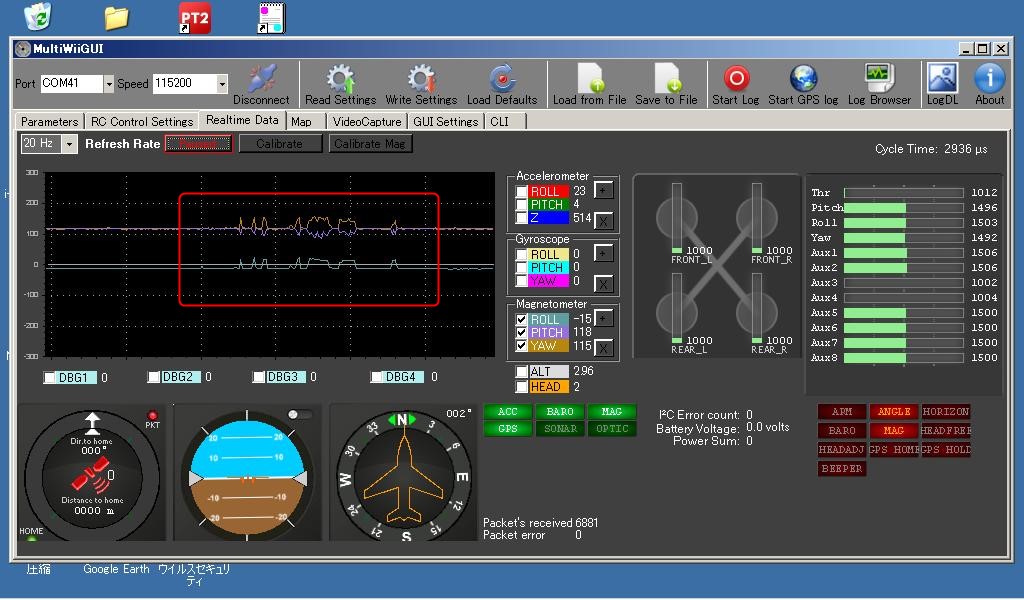 赤枠内のグラフ部分に着目してください、Magセンサー出力を表示するように設定してます、そして振れているタイミングが丁度モーターオン状態でしてフルスロットルまでアップしてます。(機対アイコンの円グラフはモーター停止時のものですので無視してください)
赤枠内のグラフ部分に着目してください、Magセンサー出力を表示するように設定してます、そして振れているタイミングが丁度モーターオン状態でしてフルスロットルまでアップしてます。(機対アイコンの円グラフはモーター停止時のものですので無視してください)
FCボードとセンターボード間距離を離す
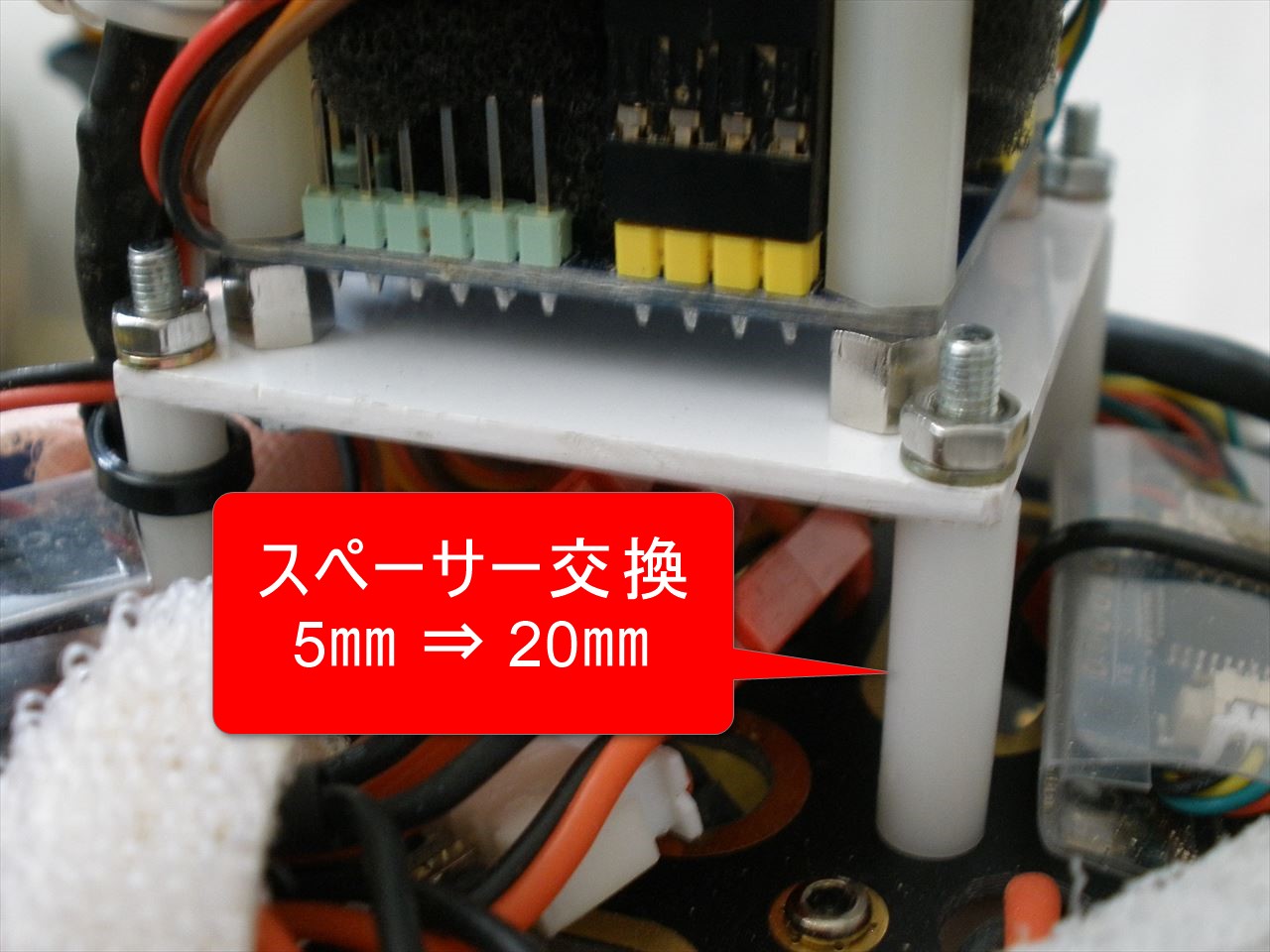
取付板(白色塩ビ板)とセンターボード間に挿入してあるスペーサーを5mm⇒20㎜に変えて現状に対して+15㎜距離を離しました。(透明プラケースは高さオーバーのため取り外しました)
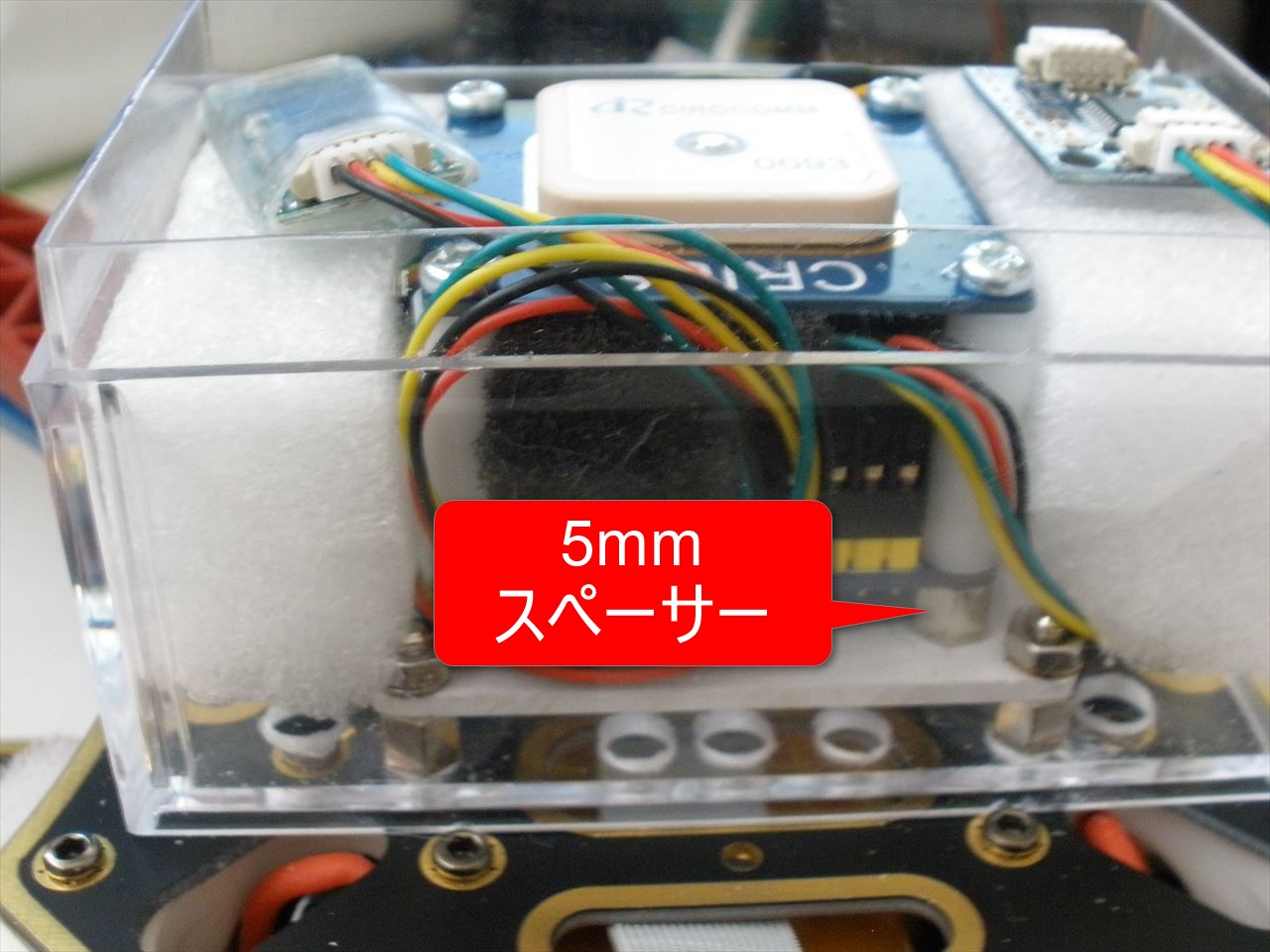
こちらの画像は変更前のものです
FCボード位置変更後のMAGセンサー干渉
 ほぼゼロを期待したんですが、まだ出てます、それでも減少は認められるのでとりあえずこれで進めることにします。
ほぼゼロを期待したんですが、まだ出てます、それでも減少は認められるのでとりあえずこれで進めることにします。
その他のレイアウト変更
BTボード、GPS-I2Cボード、UBECなどのレイアウト変更を実施。
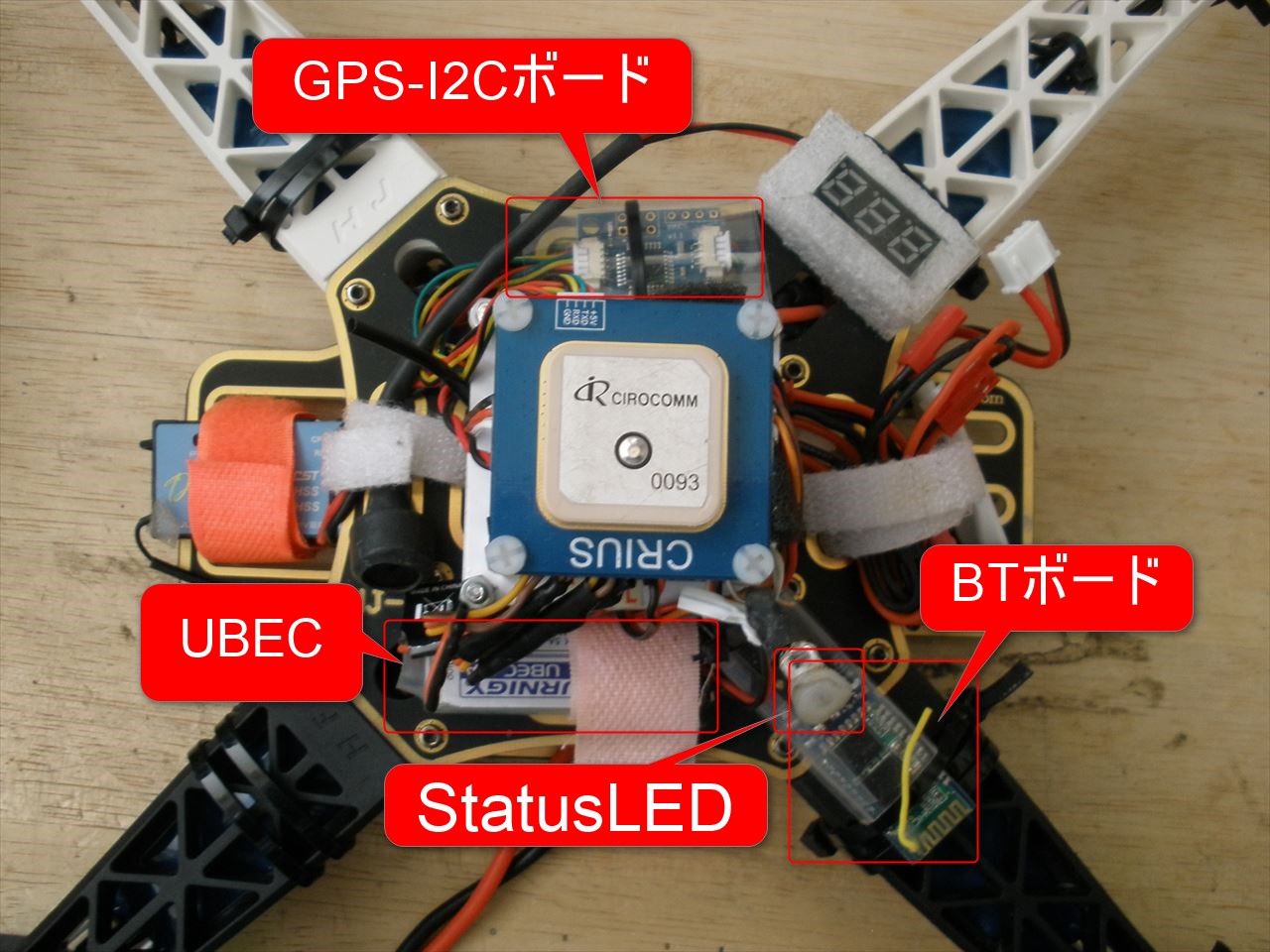
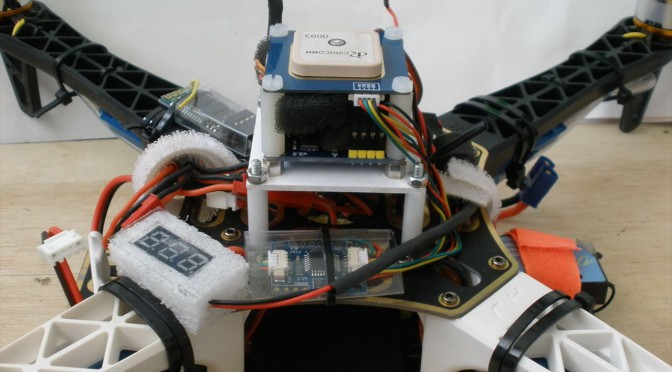
全体を俯瞰すると、こんな感じです。
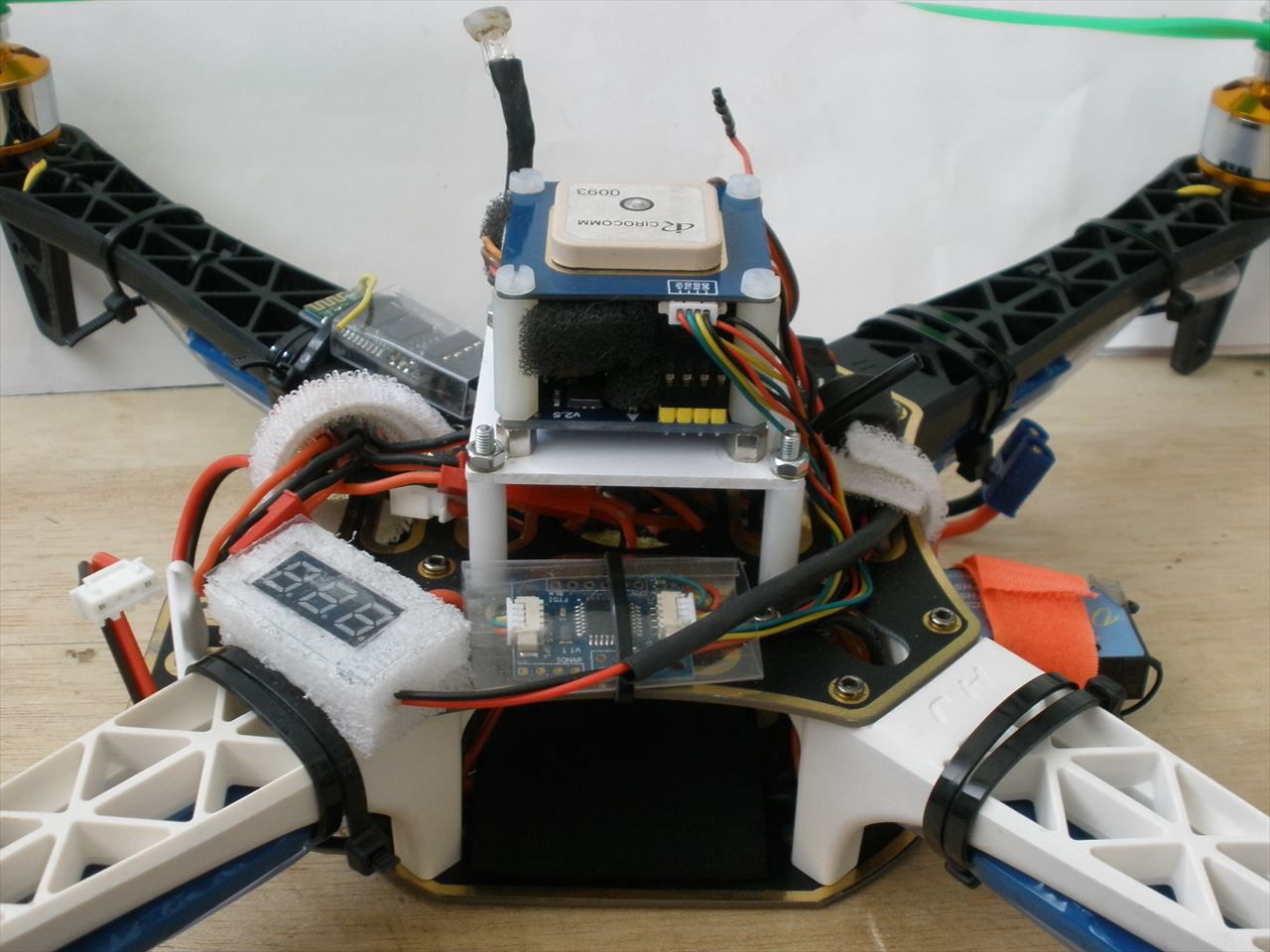 気圧センサーがまともに風を受けるので何か遮蔽物を付けないと...
気圧センサーがまともに風を受けるので何か遮蔽物を付けないと...
ついでですが、アーム破損のため交換なども
フリップに挑戦してまして、旋回半径が大きいので十分な高度を取らずにフリップ突入して地上激突⇒アーム&ペラ破損しました。
 交換部品はAmazonで4本(一機分)で1100円程度と安く売ってますので交換しました、但し赤・白のコンビネーションが無くて黒・白を購入したので今回からアームが黒白になりました。
交換部品はAmazonで4本(一機分)で1100円程度と安く売ってますので交換しました、但し赤・白のコンビネーションが無くて黒・白を購入したので今回からアームが黒白になりました。
このアーム、同じくAmazonでは約700円単品販売してますが、一本の単品で700円、4本で1100円とはいったいどういう価格体系なのでしょうかね。店によっては単品約1300円もあるし。(笑)
【要注意】その後、追加で赤・黒を同じくAmazonで購入しましたが以前のとは微妙にデザインが異なってます、デザインの違いはさほど困らないのですが取付ネジ位置が僅かに違うのでセンターボード固定に少々問題ありです。とりあえず段付きネジ(2.6mm)を普通の鍋子ネジで回避。要注意とは書きましたが、現物が届くまでは判らないので注意のしようがないですけどね。
GPSポジション・ホールド チューニング
これは、次回には報告できるかもです。今は、フリップ完成に向けて練習中なので暫く先になるかもしれません。
以上