

前回に引き続きArduCopterサイトのFirstTimeSetup手順に従って組立を進め、部品組付け&配線まで終了。尚、今回の参考にしたページはAssembly Instructionsです。
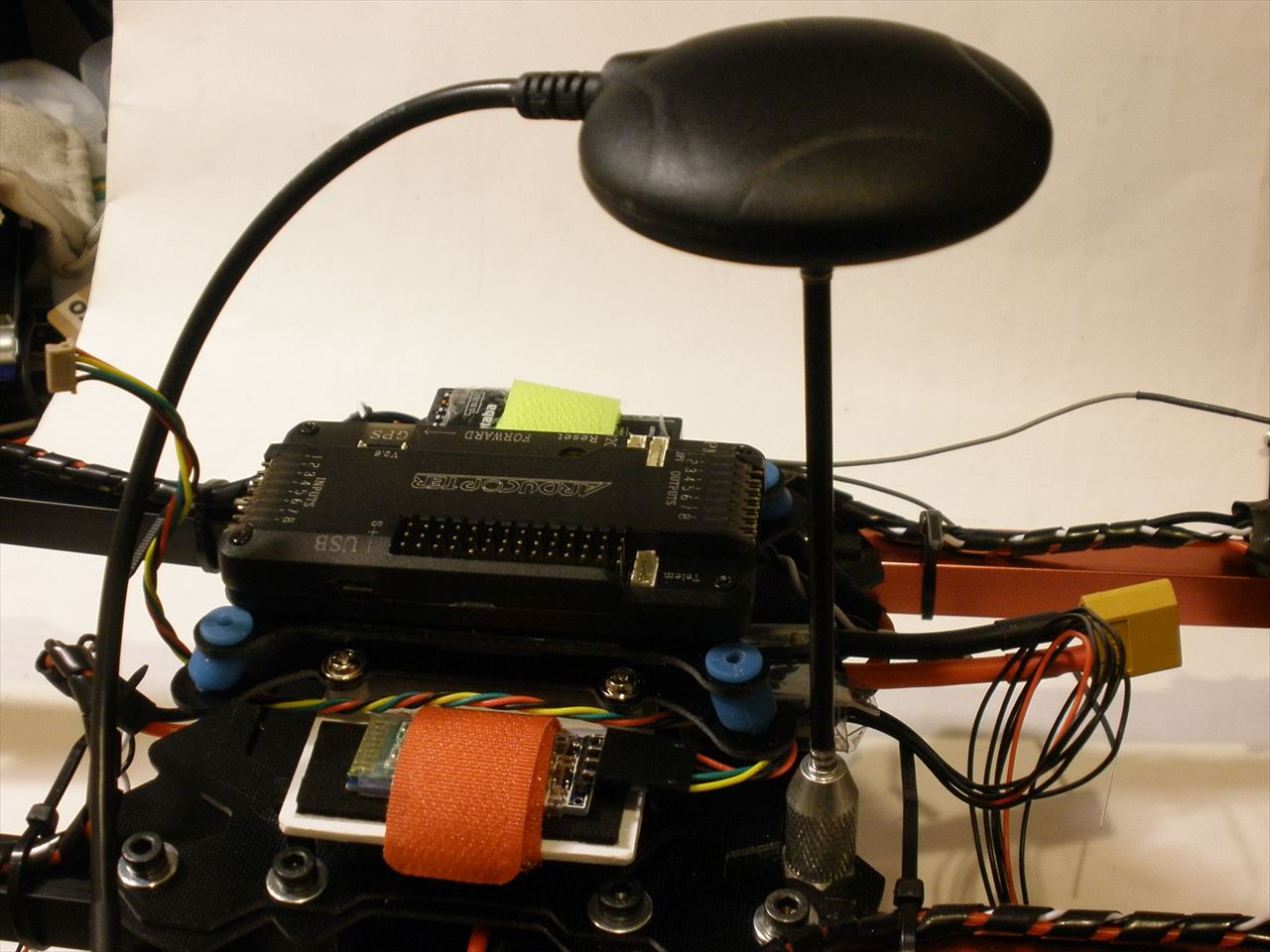
こんな感じでできました。
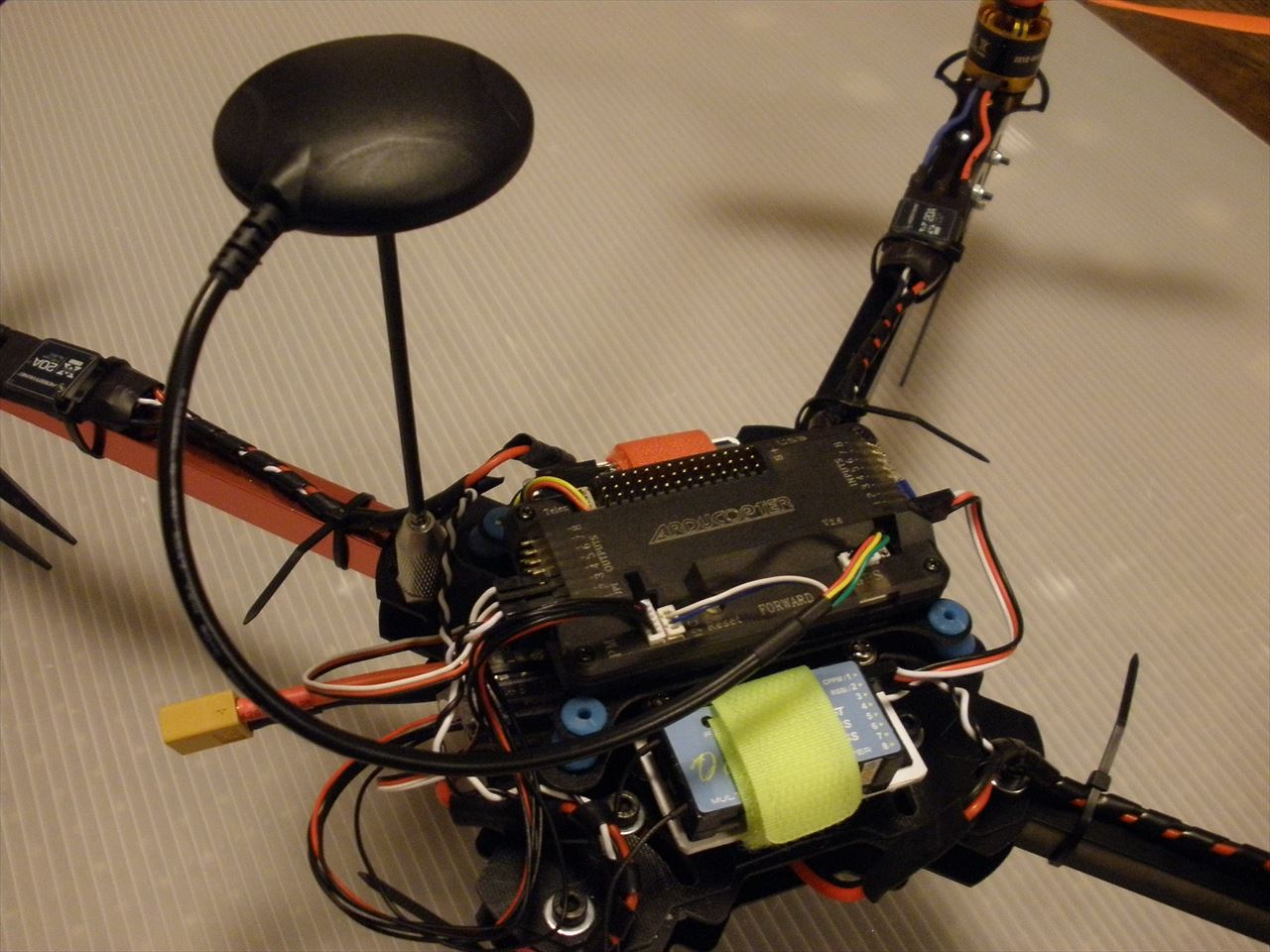
なるべくスッキリと収めたくて今回も仮組み、分解を数度となく繰り返してます、更に追加工もしてます。ということで完成までに4-5日かかりました。とりあえず付いちゃえばいいやという考えなら一日もかからないとは思いますが、ついつい変な所にこだわってしまいます。尚、火入れはまだです。
取り付けた部品:(各部品の詳細は前回記事を見てください)
- APM2.6フライトコントローラ[互換品]
- GPSモジュール(MAGセンサー付)
- BTモジュール
- 電源コネクター・BEC&センサー内蔵
- 電源分配ボード(PDB)
- ブラシレスモーター[RCX製BE2212-13(880KV)]
- ESC[HobbyWing製X-ROTOR20A]
- 受信機[FrSky製Delta8]
尚、今回参考にしたのは同サイトのAssembly Instructionsのチャプターです。①~④が関係のあるところです。

①Mounting the flight controller
まずは、フライトコントローラの取付ですが、ArduCopterサイトのMounting the flight controllerのページには取付方向の注意書きとAntiVibration対策に気を払えの2点しか書いてありません。個別のフレームへの取り付けは自分で考えてくださいということでしょう。
というわけで自分なりに考えて取り付けた方法を紹介します。
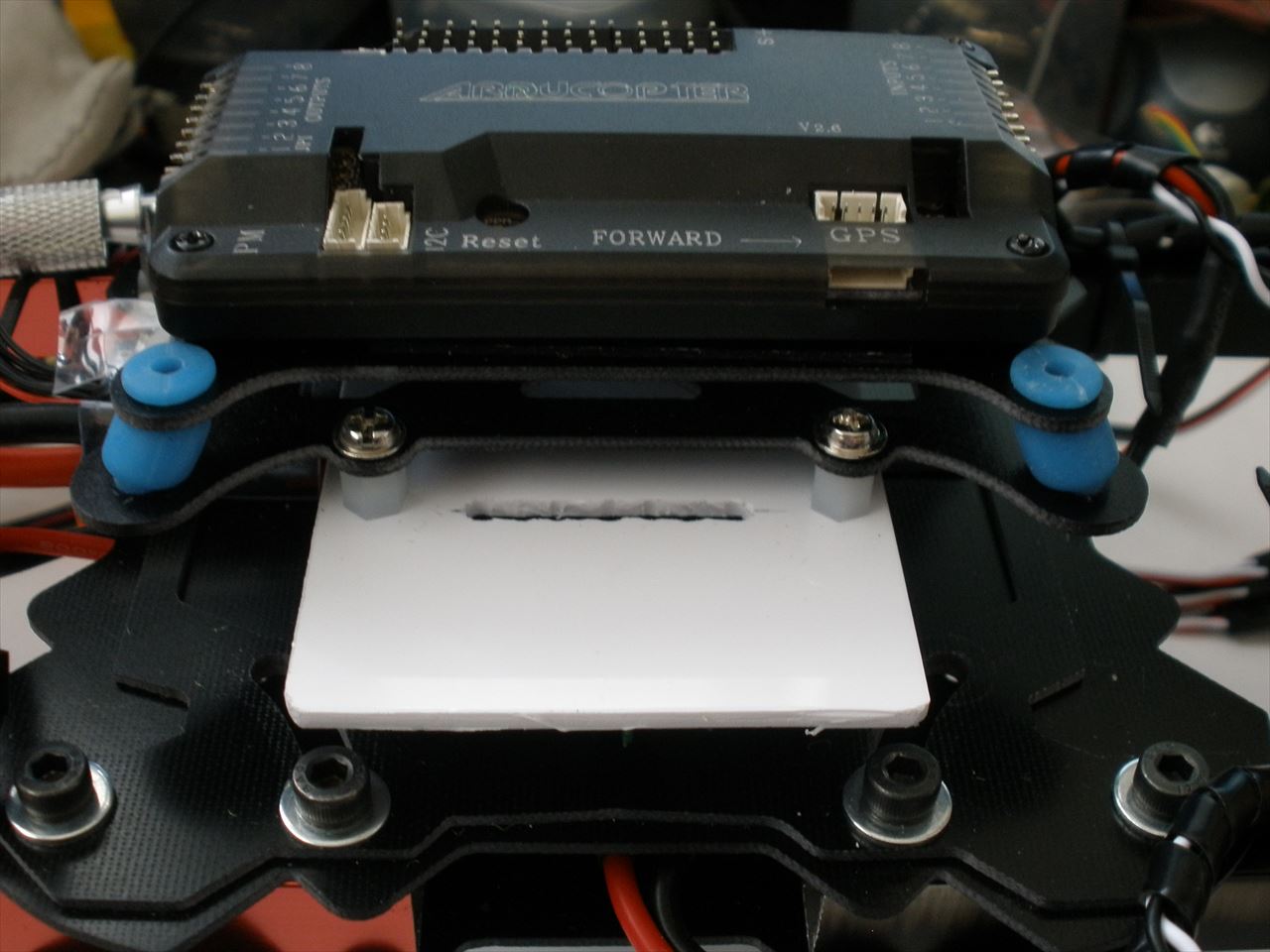
APM2.6取付
まずは、10㎜スペーサをセンターボードに付けます。尚、画像の真ん中にある赤・黒リード線は電源分配ボードへとつながっている物です。(あとでまた説明するので、今は関係無いので無視してください)

その上に2mm厚の発泡塩ビ板(100x55mm)を取り付けます。尚、この発泡塩ビ板は受信機、BTモジュールの取付用に作りました。
更に5㎜スペーサを付けて、その上にAPM用のダンパー取付板を介してAPM2.6を付けます。
 尚、このAPM2.6ボードも他のFC同様に取付方向性があるので要注意です。APM2.6ケース上のFORWARD表記横の⇒が進行方向です。
尚、このAPM2.6ボードも他のFC同様に取付方向性があるので要注意です。APM2.6ケース上のFORWARD表記横の⇒が進行方向です。
ArduCopterサイトのMounting the flight controllerのページにも取付取付方向に注意と書いてあります、そして更に取付方向はカスタマイズ可能なのでMissionPlanner上で気に入った方向に設定変更せよとも書いて有ります。
VibrationDamping
FCに取って振動は大敵ということでしょうね、ArduCopterのVibrationDampingページではかなりの量で振動対策について書いてます、振動による影響を0.1G以下にせよというのが一番のポイントでしょうか、それと対策例が素材ごとに書いてあるのが参考になります。なかでも3Dプリンタで作ったAnti-VibrationPlateというのが興味津々です。3Dデータも提供されているので3Dプリンタがあれば自作可能ですし、自作が無理でもこのサイトから完成品の購入($20)も可能のようです。いずれにしても、今はスルーして完成後にACCでGを測定しながら取付方法の再構築ということになります。
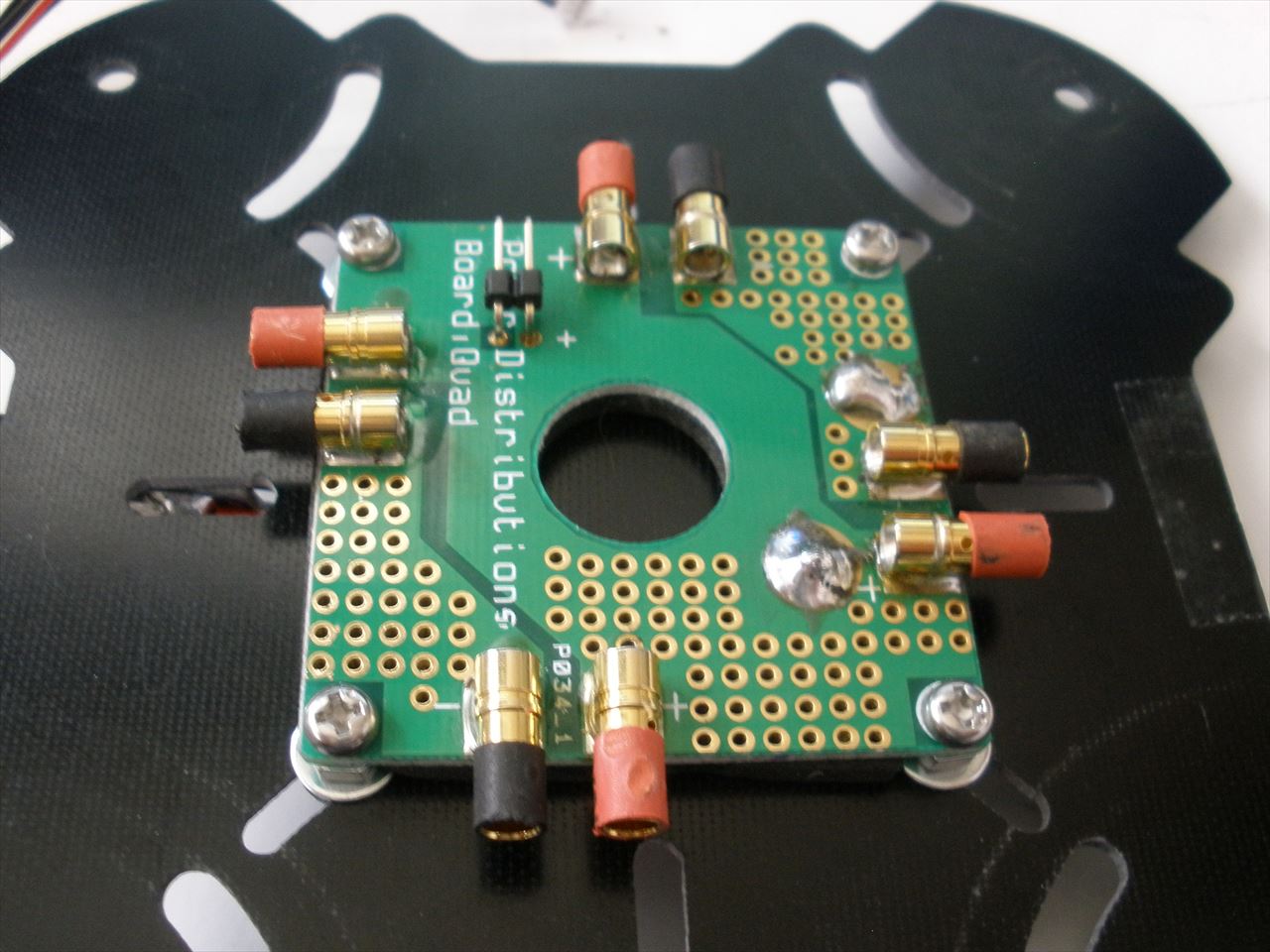
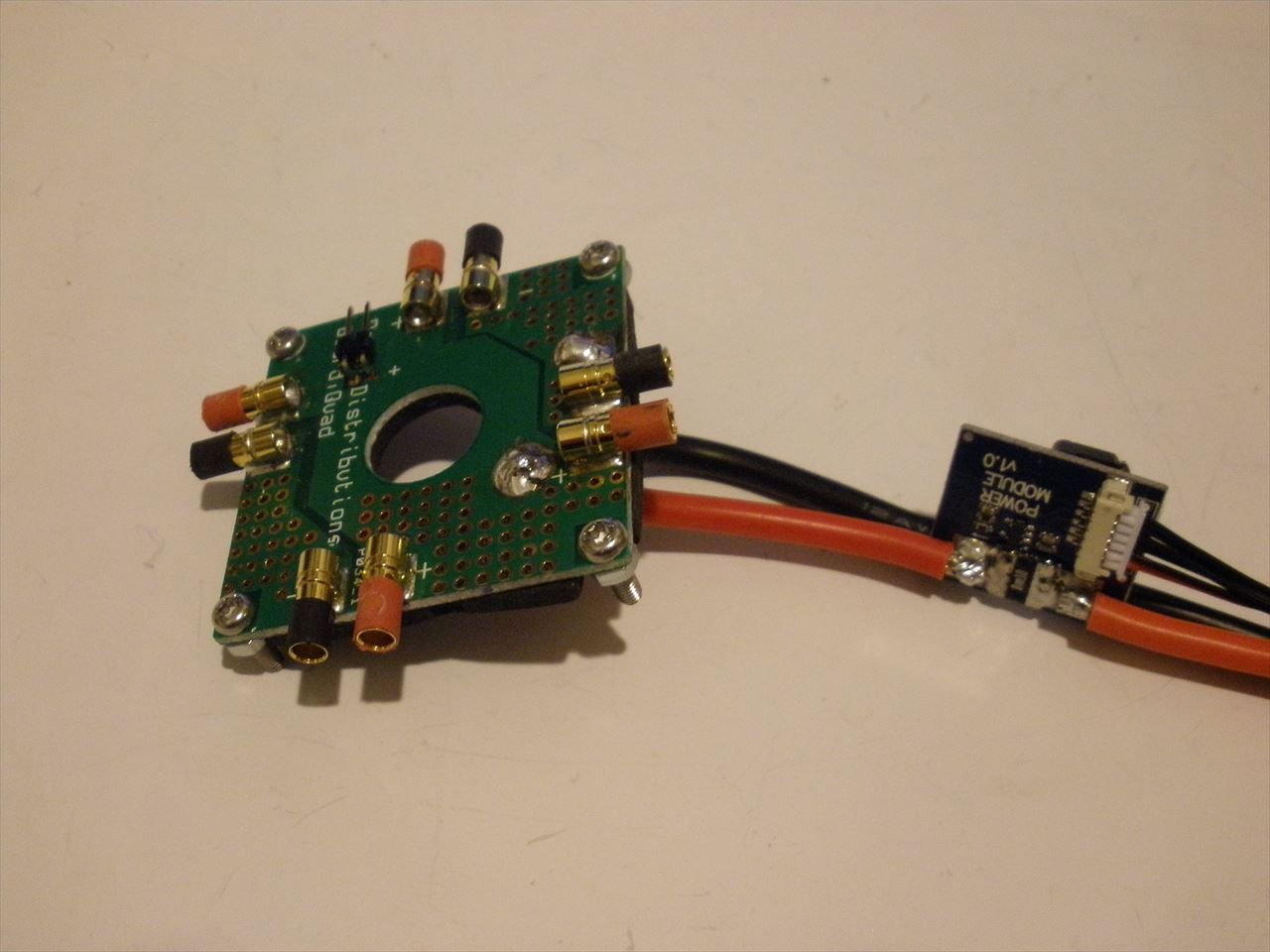
電源分配ボード(PDB)
最近はフレームそのものにプリントパターンを這わせてあるのが主流のためこのPDBは不要なのですが、このX525のセンターボードは文字通りの普通のボードです。なのでヤフオクで以前に購入したあった汎用のPDBを使います。話が前後しますが英語ではこの電源分配ボードのことをPDB(PowerDestributionBoard)と呼んでるようなので我も今後はこの呼称で行こうと思います。(タイプインも楽だし)
取付はセンターボード(天板)の裏側にネジ止め、正確にはネジで固定してなくて単に表側に貫通させてFC取付用の10mmスペーサで固定です。
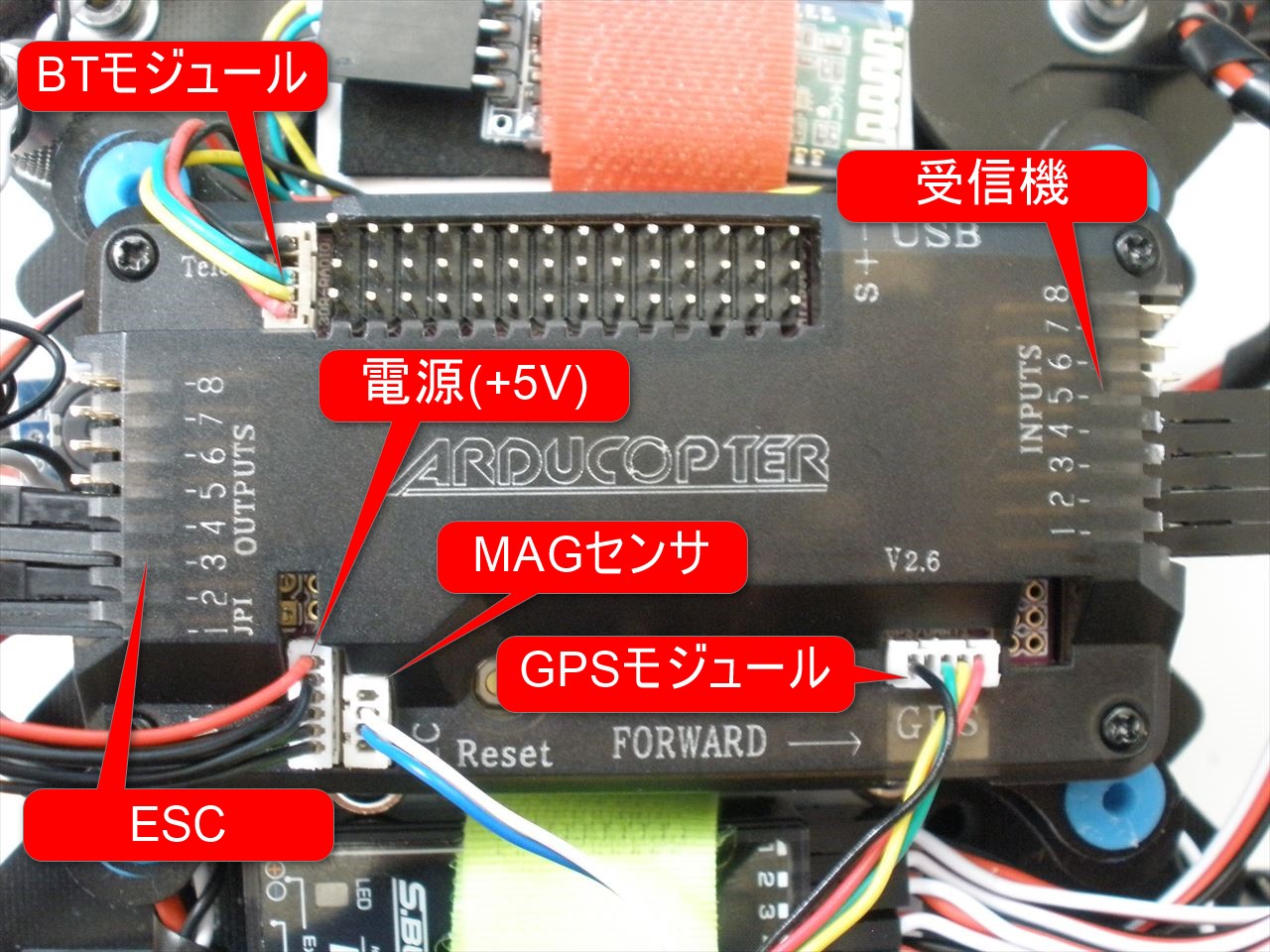
電源コネクター・BEC&センサー内蔵
リポ電池とPDBの間にかませるコネクタというと、「何これ?」状態になります。それよりもBECと言った方が適切かと思います。
これがオリジナルの接続状態です。左端のXT60コネクタ(黄)がリポ電池と接続され、隣の小さなボードがBECと電圧&電流センサーを搭載したボードでこのボード経由でFCに+5Vの電源が供給されます。
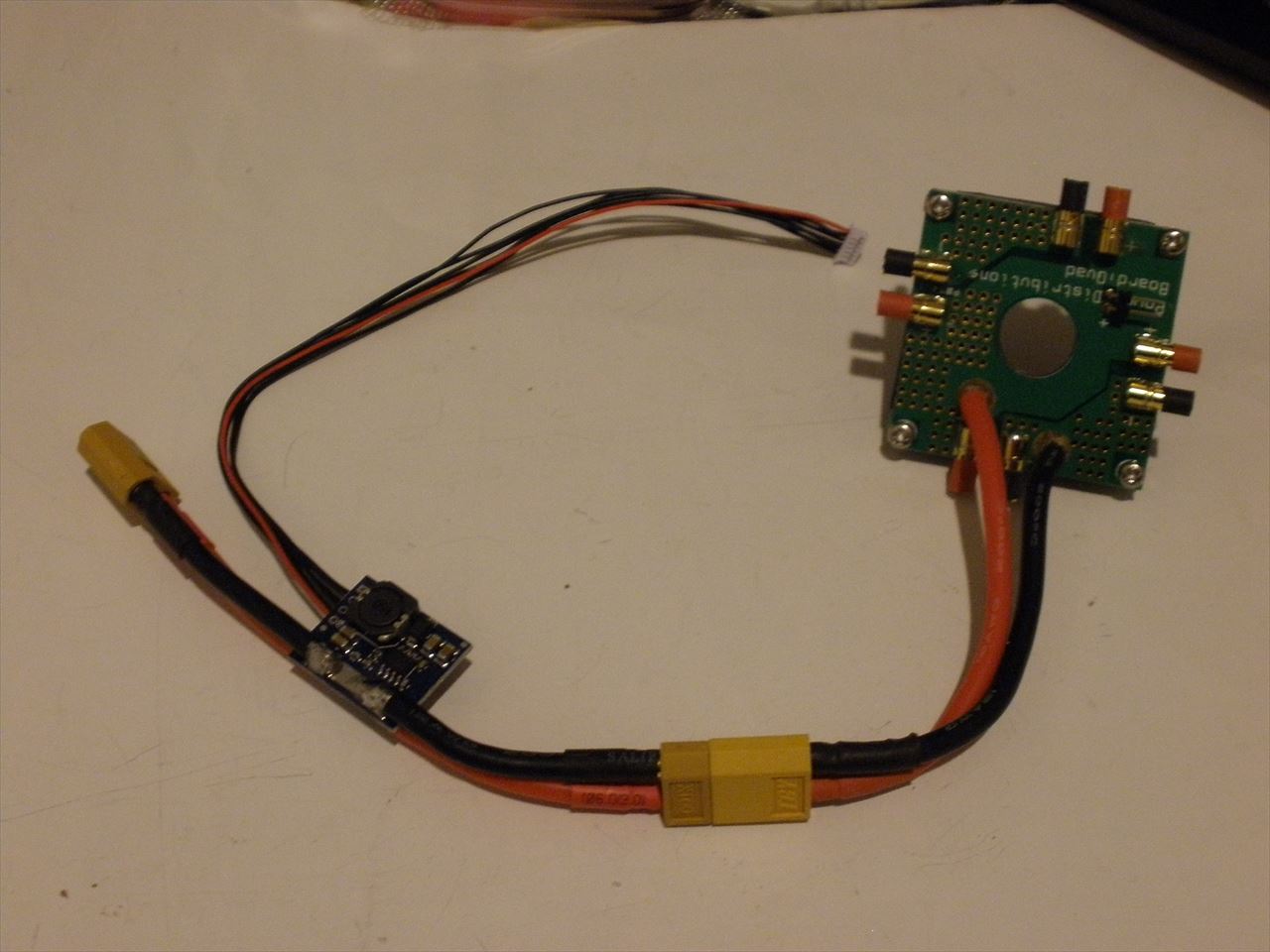
でも、この状態ですと中間のXT60コネクタ周りがなんとも邪魔なので改造してダイレクト接続にしちゃいました。更にボード裏からリード線が出るようにして配線経路を短くしました。
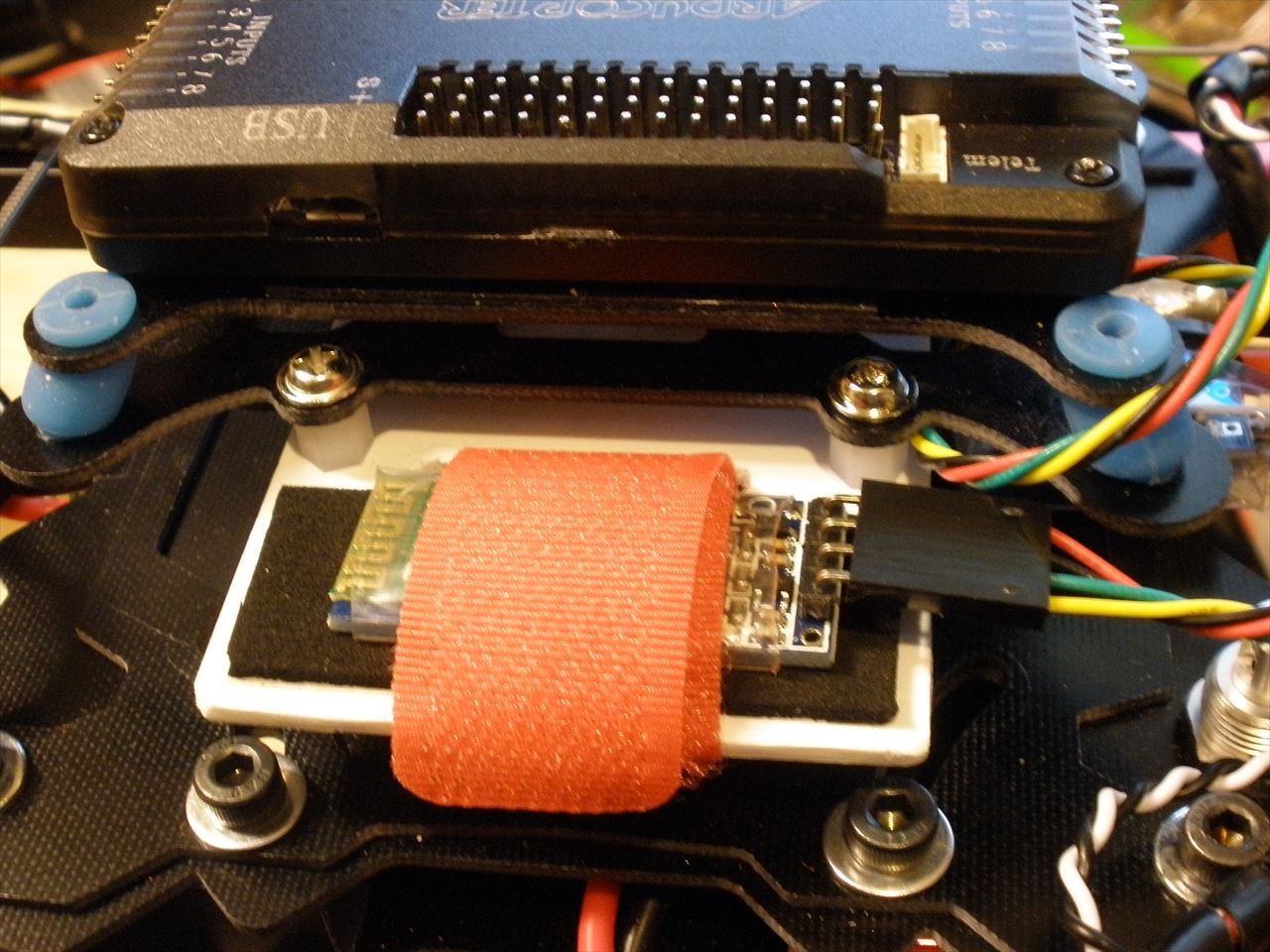
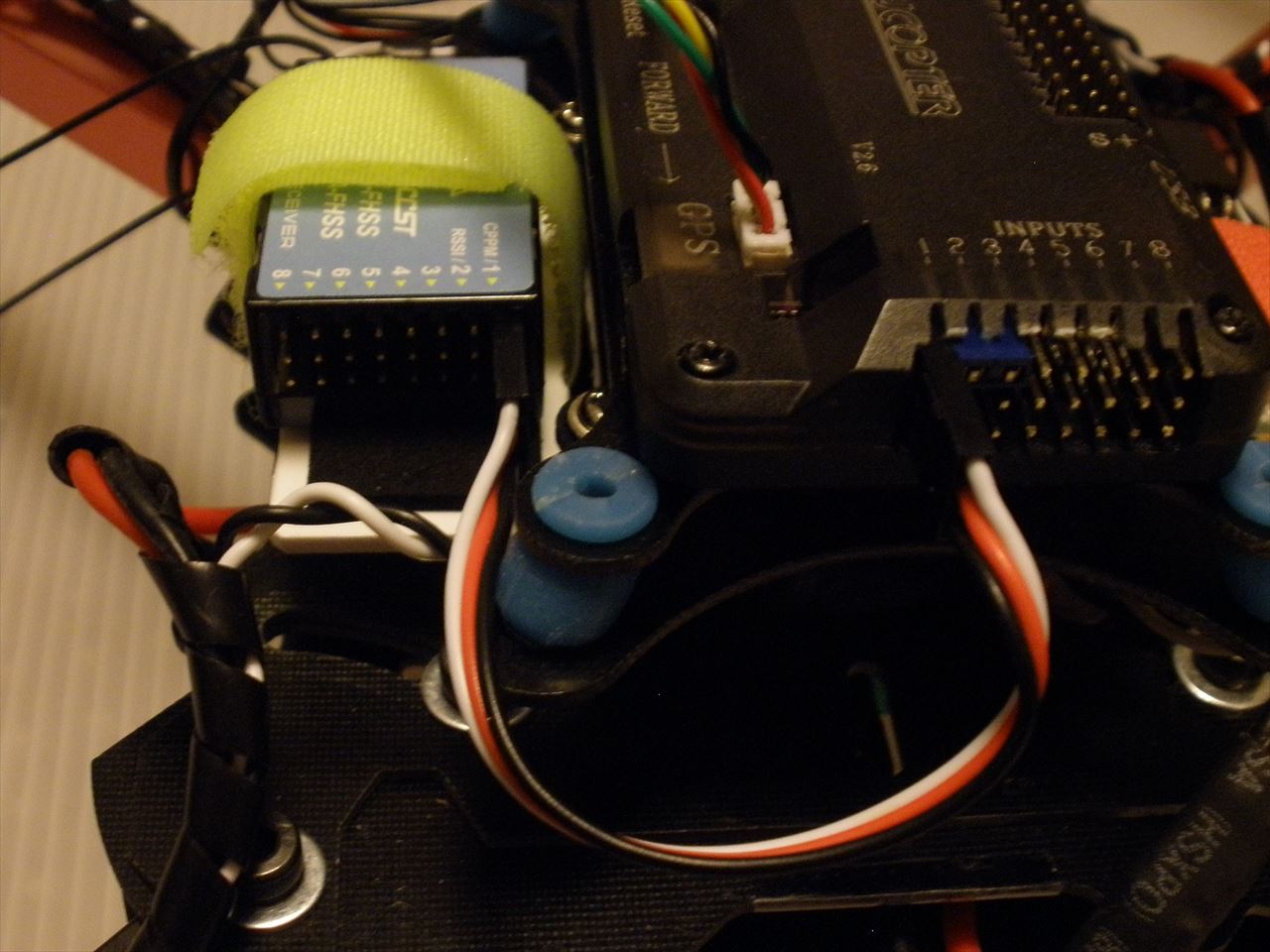
受信機[FrSky製Delta8]
固定はベルクロのみですが、発泡塩ビ板ダイレクトではすり抜けそうなので間に滑り止め用にウレタン・スポンジ・シートを敷きました。
当初、Futaba のR3008SB搭載の予定でしたがAPM2.6がSBUS未対応とわかり、FrSKyのDelta8でCPPM接続にしました。(R3008SBでも個別チャンネル接続すれば問題なく動作するのですが、いかんせんケーブルの数が多すぎます)
 ちなみにPixhawk/PX4はSBUS/CPPM対応で、逆に個別接続は未対応のようです。(でもSBUS2は未対応と書いてある?)
ちなみにPixhawk/PX4はSBUS/CPPM対応で、逆に個別接続は未対応のようです。(でもSBUS2は未対応と書いてある?)
BTモジュール
同様に発泡塩ビ板にウレタン・スポンジ・シートを敷いてベルクロで固定です。
GPSモジュール(MAGセンサー付)
センターボードに3mmφの穴を開けて、GPS取り付け台をネジ止めです。でも、このままでは確実にフライトで外れるので耐振動、耐衝撃を考えないとダメです。
ところで本家3DR製のGPSモジュールには方向性があり、ケースに矢印表記がありこれをAPM2.6と同じ方向に合わせよ、ということになってますが、このGPSモジュールにはそれらしきものが無いですね。(とりあえずこのまま進めて、あとで悩むことにします。)
ブラシレスモーター&ESC取付
最初は、アームのアルミ角材の中にケーブルを通して見た目にスッキリさせようと思ったんですが、だんだんと面倒になりそのままアームに這わせるだけにしました、固定もインシュロックで単純に留めただけです。

ESCとPDBを接続するリード線は短くて届かないので5cmほど延長してあります。


②Connecting the Radio Receiver (APM2)
次のページのConnecting the Radio Receiver(APM2)に進みます。受信機とAPM2.6との接続です。
CPPM接続のためケーブルが一本で済むのでスッキリですね。CPPM設定のためにAPM2.6のINPUT2とINPUT3の間にショートプラグが必要です。
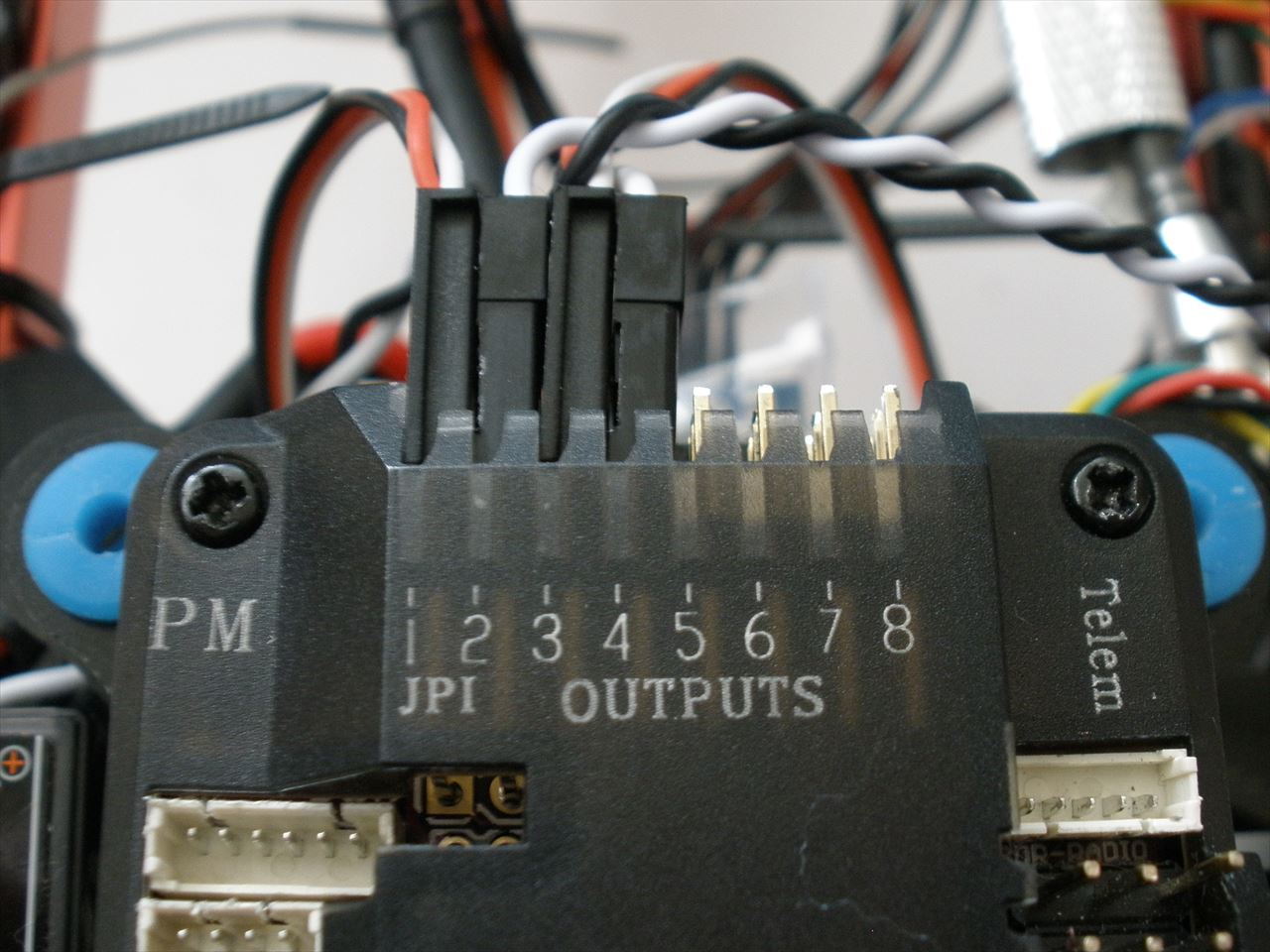
③Connecting the ESCs and Motors(APM2)
次のページのConnecting the ESCs and Motors(APM2)に進みます、ここではESCとMotorのワイヤリングです。機体のタイプ(QuadとかHextとかの)に従い単純に接続するだけで何も難しくなく終わりました。
サイト内ページでは結線方法以外にも①プロポを使った回転方向確認、②MissionPLannerを使ったモーター番号確認方法も書いてあります。こちらについてはまたあとでゆっくりとやろうかと思います。
④Installing GPS+Compass module
次のページ Installing GPS+Compass moduleに進みます。
このページではワイヤリングとMissionPLannerを使った設定方法について書いてあります、ここではワイヤリングだけにして設定方法はまた別途ということにします。(MissoonPlanner接続&設定はまた別記事で書く予定です。)
PixhawkではSecondaryGPSの搭載が可能でGPSの二重化ができるようです捕捉衛星数の多い(2個以上)GPSの方を自動で使うようになるとのことです。(こうなるとAPM2.6はだいぶ分が悪いですね、Pixhawkを早く手に入れねばと思い始めてます)
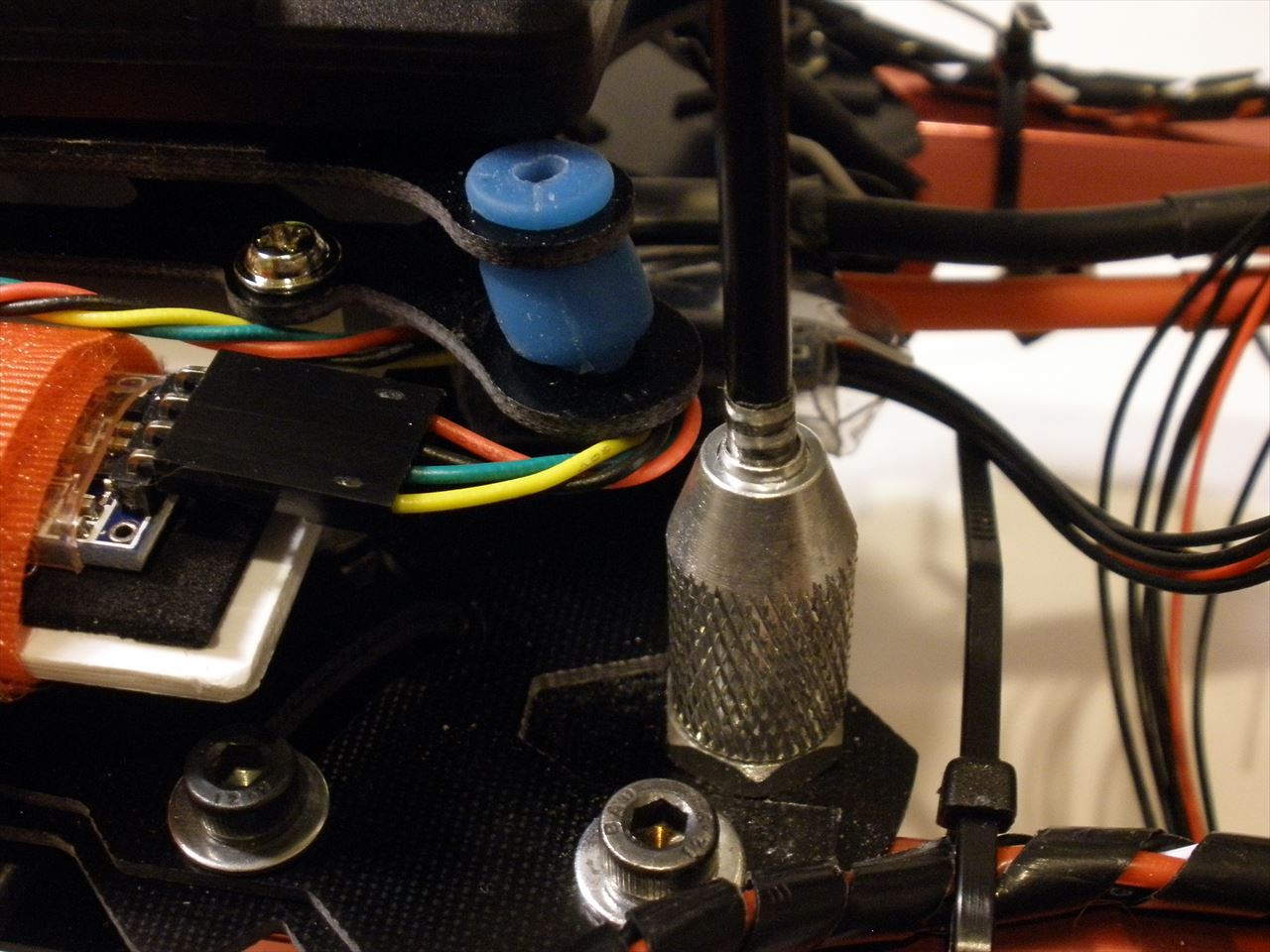
コネクタ接続状態
ここまでで配線まで完了です、次回はMissoonPlanner接続ですね、サイトのチュートリアルでは次回は最新ファームのダウンロードということになります。