
AudoCopterサイト内のFirstTimeSetupというチュートリアルに従って進めてますが、今回からはMandatory Hardware Configurationに突入です。文字通りMandatoryなので必須アイテムですね。
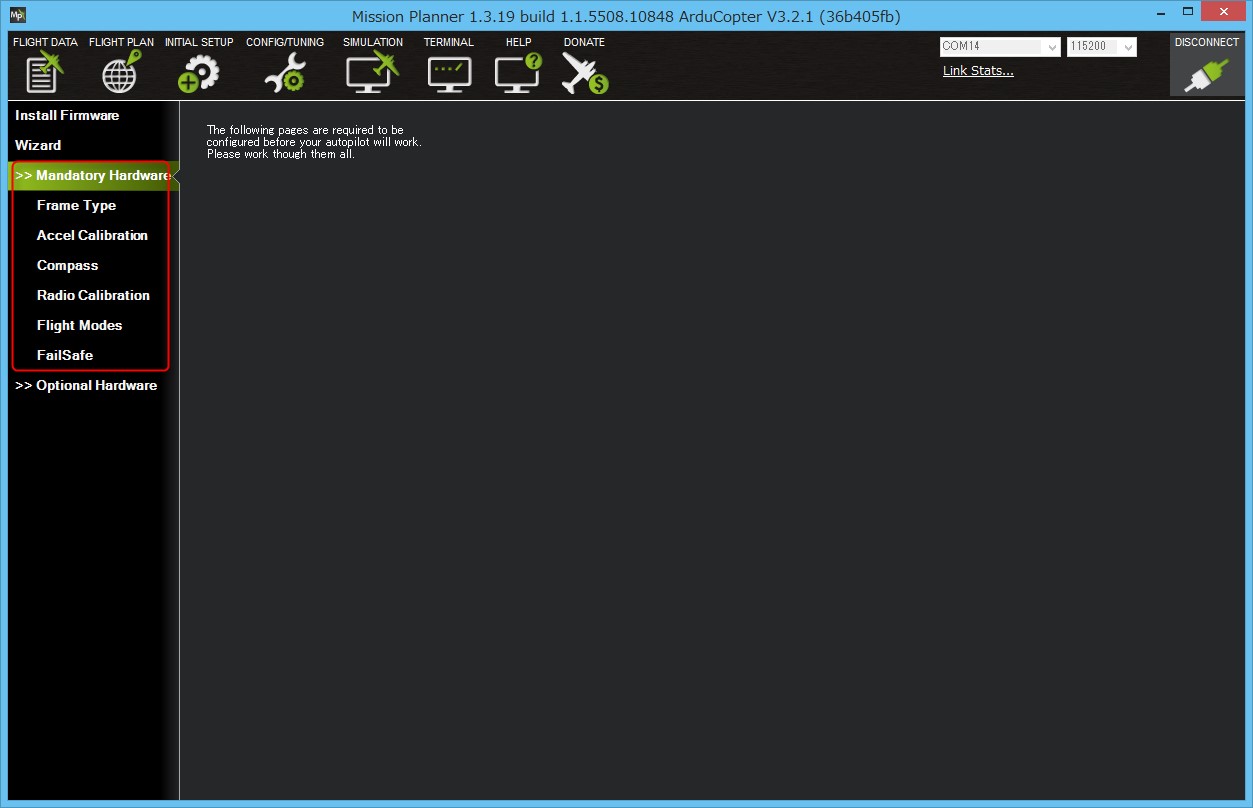 MandatoryHardwareConfigurationアイテムとは以下の項目です、
MandatoryHardwareConfigurationアイテムとは以下の項目です、
- FrameType
- AccelCaliburation
- Compass(Calibration)
- RadioCalibration
- FlightMode
- FailSafe
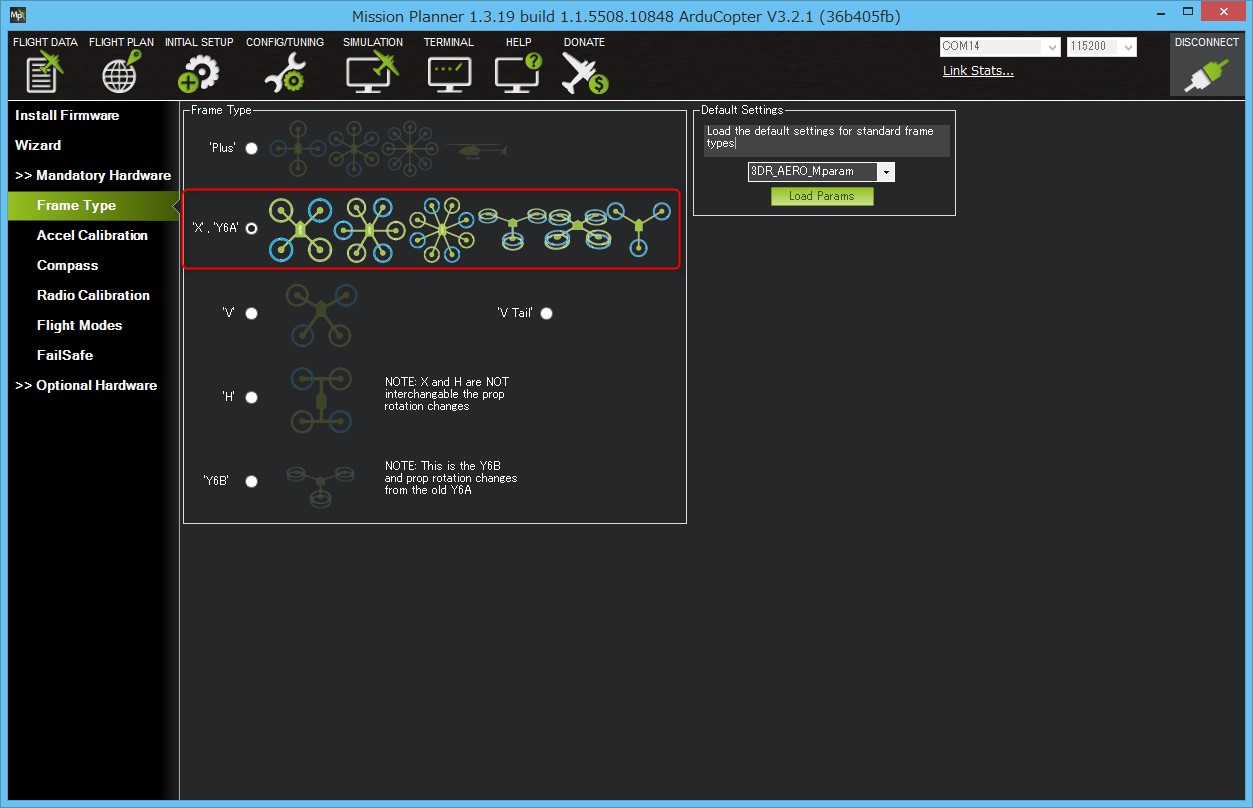
FrameType
画面の画像から該当するフレームタイプを選択します。ここではXタイプを選択です。
AccelCaliburation
日本語で言う加速度計のキャリブレーションです。
MulitiWiiのフライト前キャリブレでは機体を水平に置いてキャリブレは一発実行すればよいのですが、こちらAPM2.6は機体を表・左・右・上・下・裏と6面傾けてでやります。ちなみに、PC画面にはACCセンサーの最大値と最小値を見てますと出てきます。
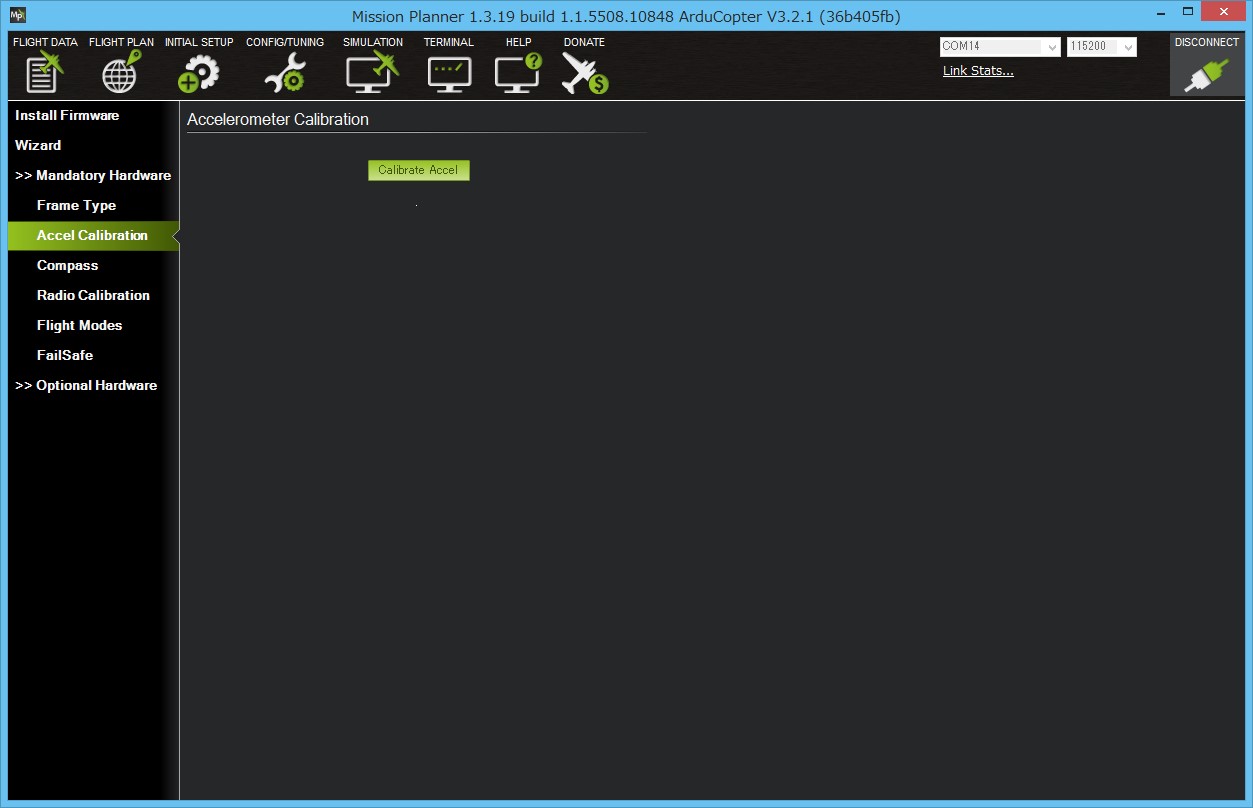 ボタンクリック後に機体を下記順番で傾けて進めていきます。
ボタンクリック後に機体を下記順番で傾けて進めていきます。
水平位置固定 ⇒ 左側を下に ⇒ 右側を下に ⇒ ノーズを下に ⇒ ノーズを上に ⇒ 裏返しに ⇒ 終了
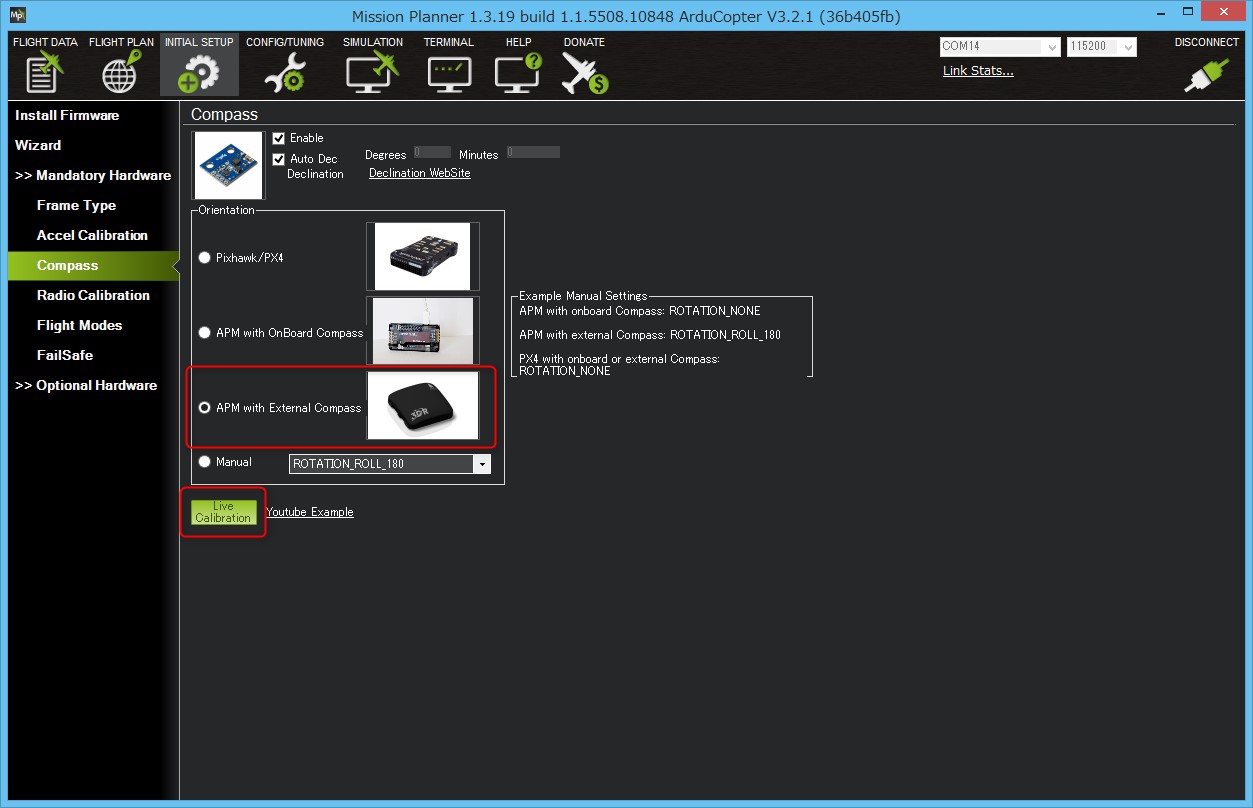
Compass(Calibration)
電子コンパス(MAGセンサー)のキャリブレーションです。
MAGセンサーの取付位置を画像の中から選択します。ここでは、外付けセンサーを選びます。
そしてLiveCalibrationをクリックしてキャリブレーションの実行です。
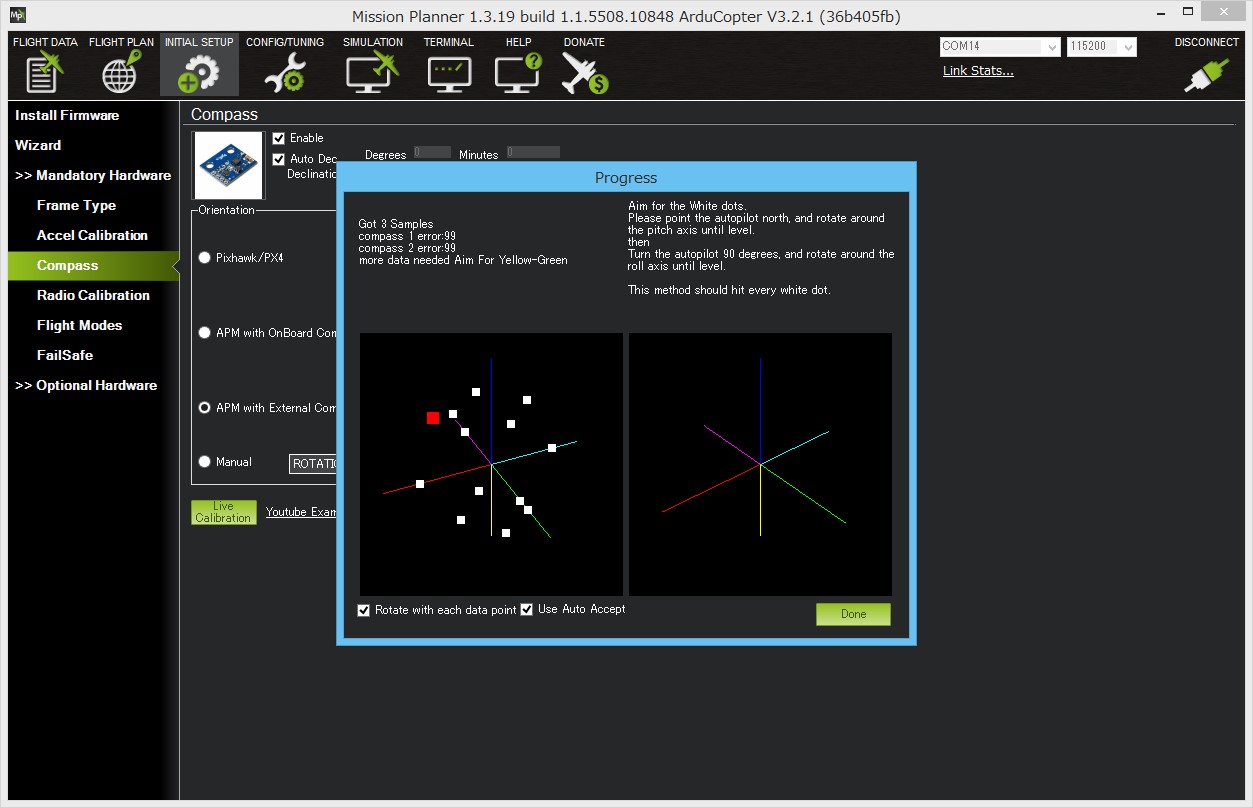
MAGセンサーキャリブレーション実行画面
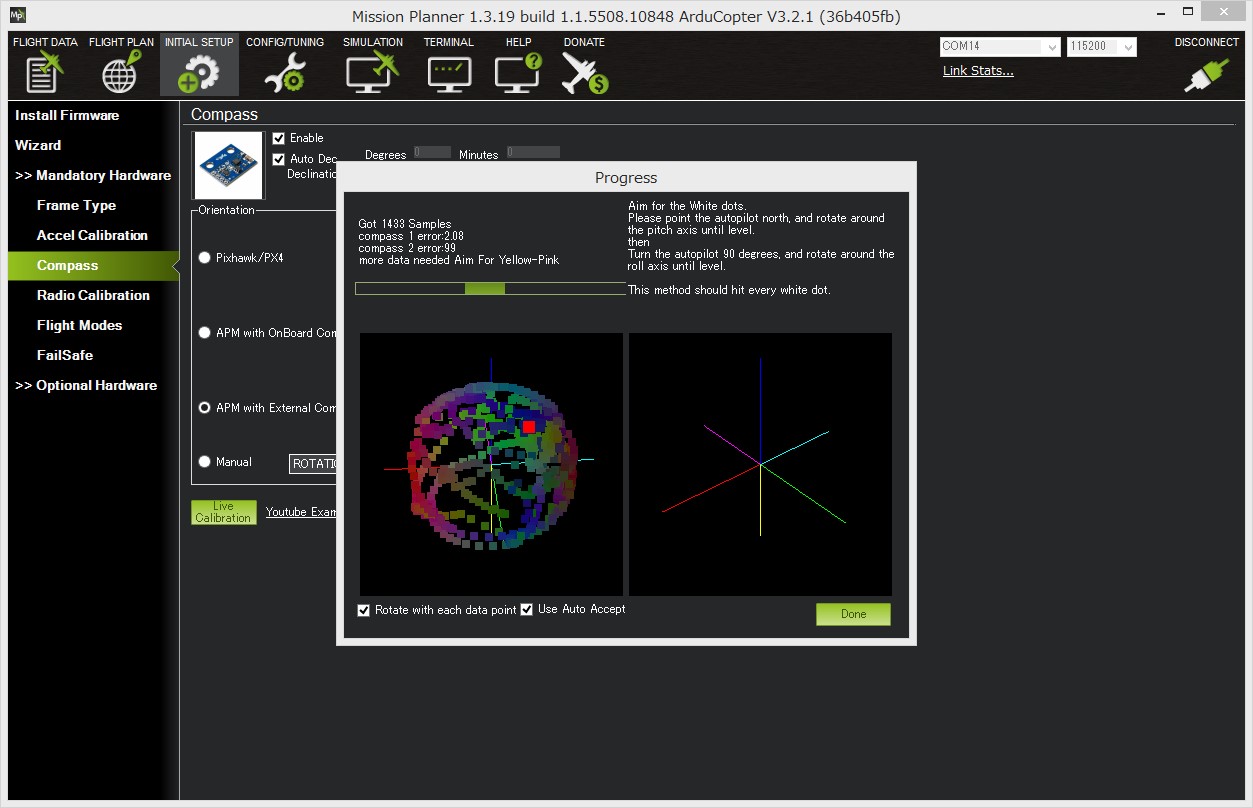
赤い四角が自機で、白い四角が捉える目標のポイントです。機体を各軸周りに回転させてこれら白い四角が無くなる様にすれば良いみたいです。
こんな感じです。中々思うように白い四角を消すことができず、ちょぅと難しいです。(でも時間をかければその内全て消滅します)
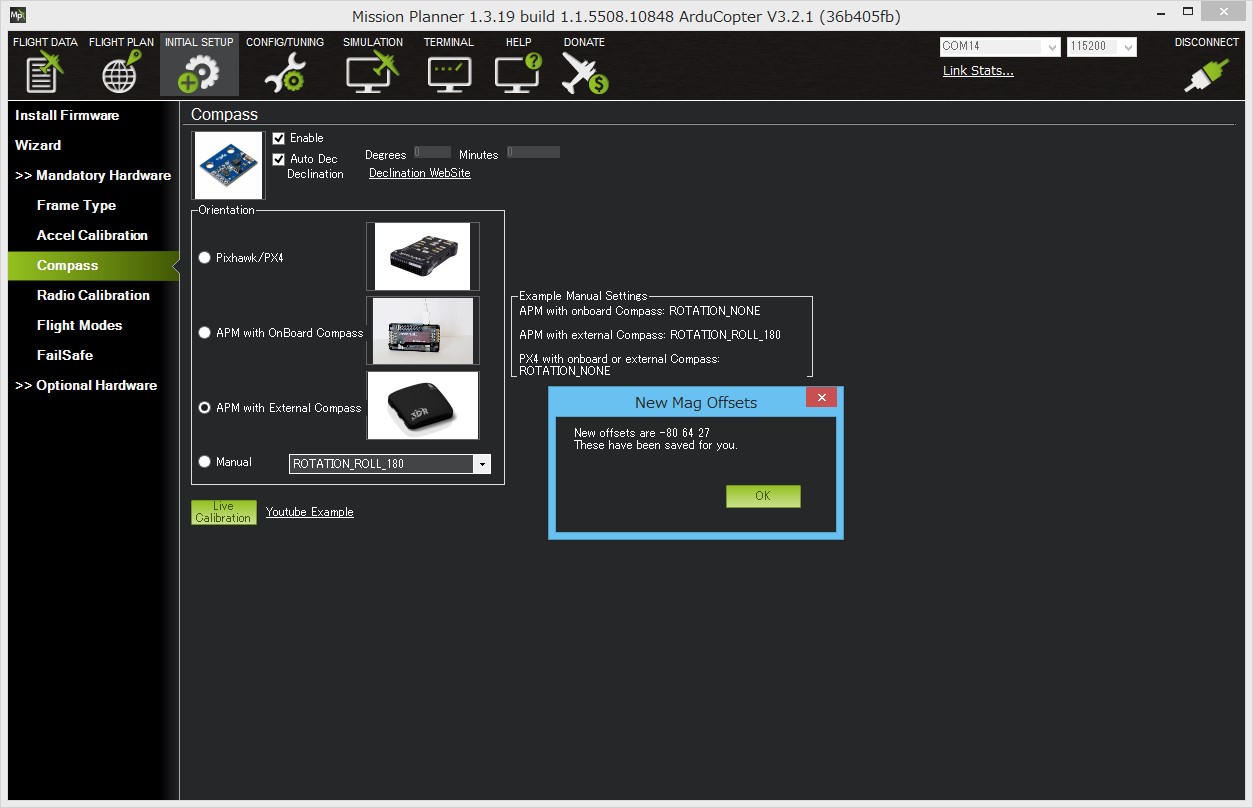
終了すると補正値を表示すると共に保存しましたのメッセージが出ます。
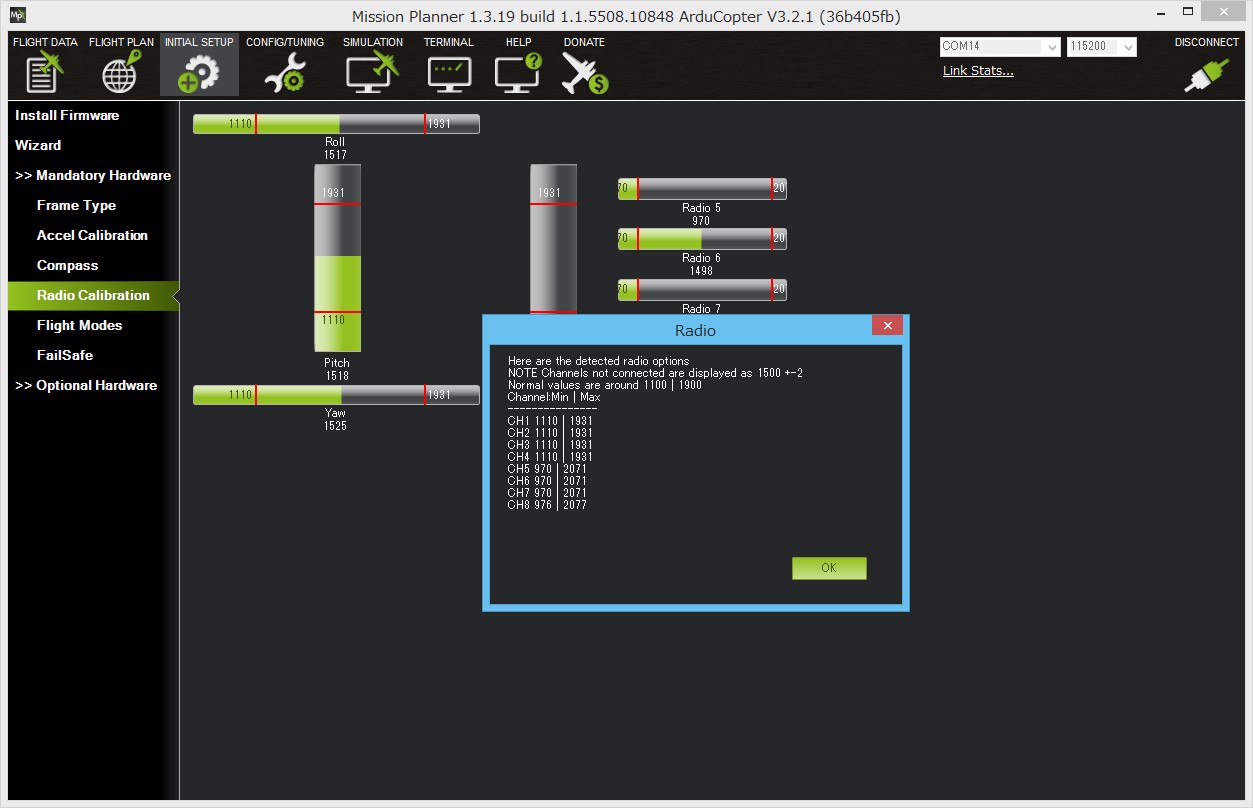
RadioCalibration
送信機の各チャンネルごとのトラベル・キャリブレーションのことです。赤いバーが出てくるまで進めて行き、そこでスティック、SWを最大まで振らします。
 おわったところでClick When Doneをクリックで最大値/最小値を表示して終了です。
おわったところでClick When Doneをクリックで最大値/最小値を表示して終了です。
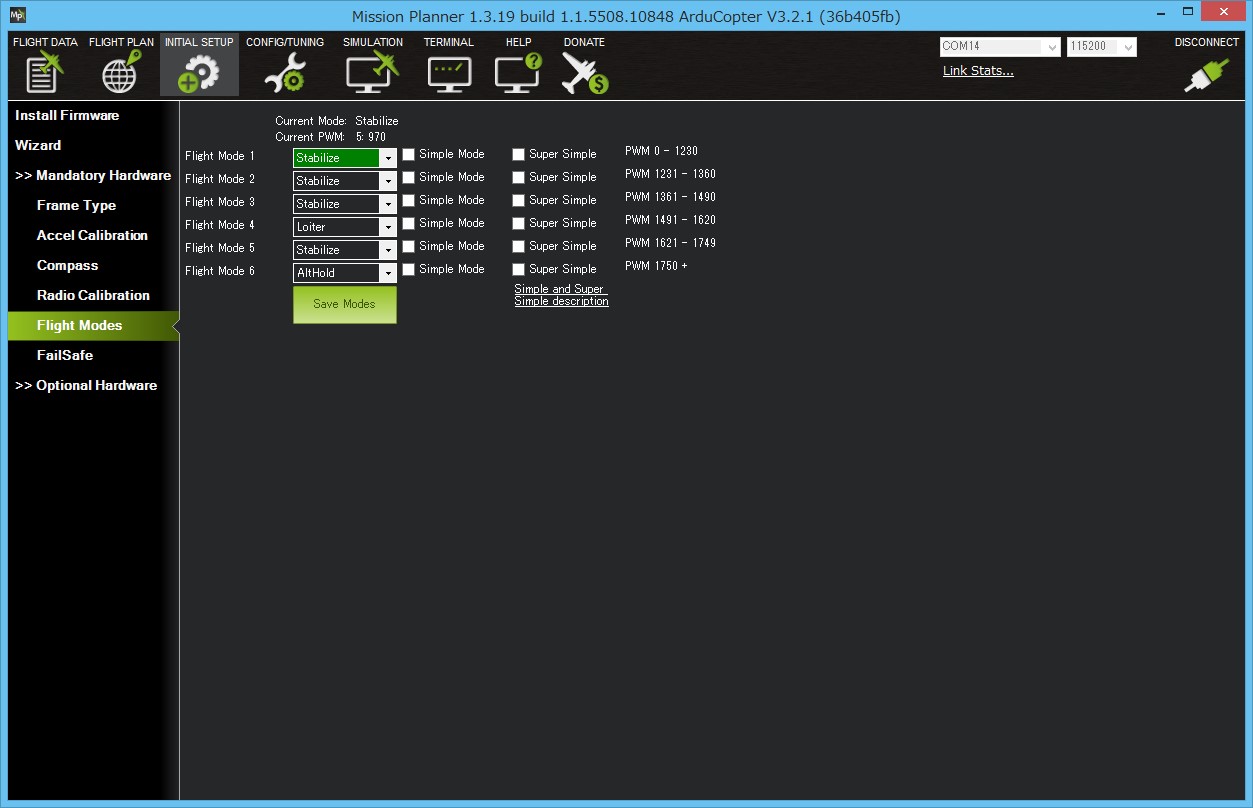
FlightMode
Ch5.に割り当てられたSWでフライトモードをどのように選択するかを設定します。Ch.5の一つのチャンネルで6種のフライモードが割り当て可能です。
ここでは、Stablizeモード、Loiterモード、AltHoldモードを設定しました。
LoiterモードとはMulitiWiiで言うPosHoldモードと同じ意味で同一地点を保持するモードの様です。
とりあえず単純に3点スイッチを割り当てただけなので設定できるモードも3種のみです。VRをCH5,に割り当てれば6モードの選択も可能ではないですがVRでうまく選択するのはかなり難しいですね。
でもサイト内を探してみたらプログラムミックス機能を使い6ポジション化するやり方が提供されているようです。(とりあえず今回はパスしますが、その内やってみるつもりです)
FailSafe
LowBatteryとRadio(受信信号無し)で両方ともにRTLモードに設定をしました。
RTLとはReturn-To-Launchのことで離陸地点に戻るということです。MultiWiiで言うRTHと同じことなのでしょうか?
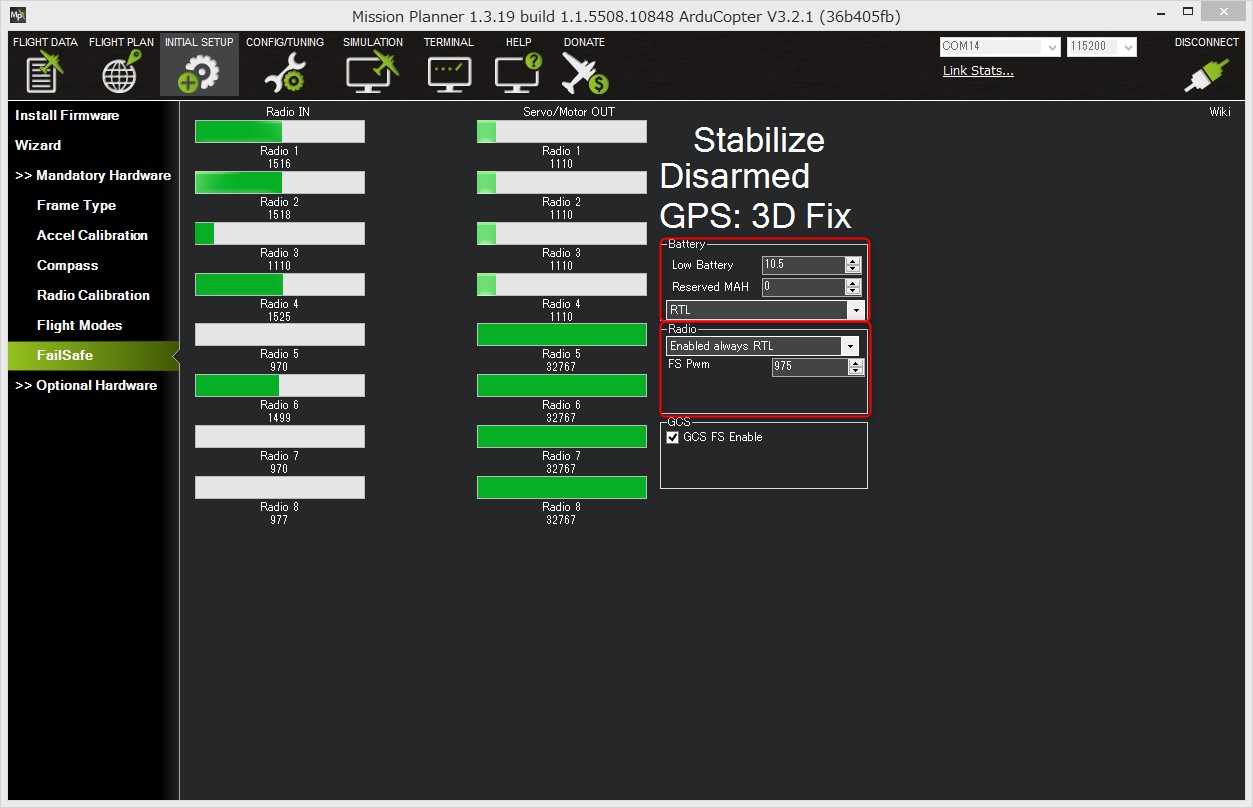
BatteryMonitor
Mandatoryアイテムではないのですが、搭載しているのでBatteryMonitorのConfigurationも実施。

今回はここまでです。次回は、多分初期設定最後の記事になると思います、ESC CalibrationとMotorSetupを書きます。