

遂に自作マルチコプター始めちゃいました、まずは初フライト成功です。
Phantom2の安定したフライトとは大違いで地面に激突すること数回(ペラ折り4本)、何とか無事に着陸に成功した動画だけをアップしました。まだフライトは不安定で操縦も大変ですがこれからのチューニングが楽しみです。(こんなこともできるんですね、スゴイです)
機体はRC e-TechからHJ450というセット商品(18360円)を購入。
- X型クワッドフレーム:軸間450mm
- プロペラ:9×4.5
- ブラシレスモーター:2212/1400KV(メーカー不明)
- ESC:ZTW Beatle20A・BEC付(5V/2A)
- バッテリー:LiPo/3セル/2200mAh(ロビンオリジナルを使用)
- フライトコントローラ[FC]:CRIUS MultiWii SE2.5
ラジコンの世界では常識の、ノーサポート&ノー説明書のためネットで情報をカキ集め、完成するまでに2か月ほどかかりました。
1.初フライト・インプレッション
- フライトモードが沢山あり選択できますデフォルトがACROモードでして、これで最初にフライトさせてみましたがこれが大失敗でした、ACROモードと言うだけあってとても軽快に猛スピードで飛んでいきます、あっという間に操縦不能⇒地面に大激突⇒ペラ破損となります。その後ANGLEモードが有効ということがわかりました。
- 実はACROモードとは明示されてなくてANGLEモードでもなく、HORIZONモードでもないのがACROモードということです。
- そしてACROモードで無いことをSTABLEモードと呼んでます。
- 最初からACROモード、STABLEモードと明示されてればSTABLEモードを選んだんですけどね。
- ANGLEモードにすると加速度センサーを使って機体を水平に保持させようとするのでやっと一安心。プロポスティック(エルロン、エレベータ)を倒すと前後左右に移動しますが手を放してセンタに戻ると機体も水平に戻ります。(これがACROモードですと傾いたまま飛んで行ってしまいます)
- フライトモードについては後日詳細を書きますがANGLEモードよりもHORIZONモードの方が良いですね、Phantom2の操縦感覚に近いです。
- 高度維持を自動でさせるにはBAROモードをオンさせるようです。ようですと言ってるのはこの日は不慣れの為試せてないからです。
- GPS未搭載なのでRTHとかGPSホールドなどはまだ先です。GPS基板一式は注文済なんですがまだ届いてません。トラッキング情報だとシンガポールからは発送されたようですがいつになるやら。
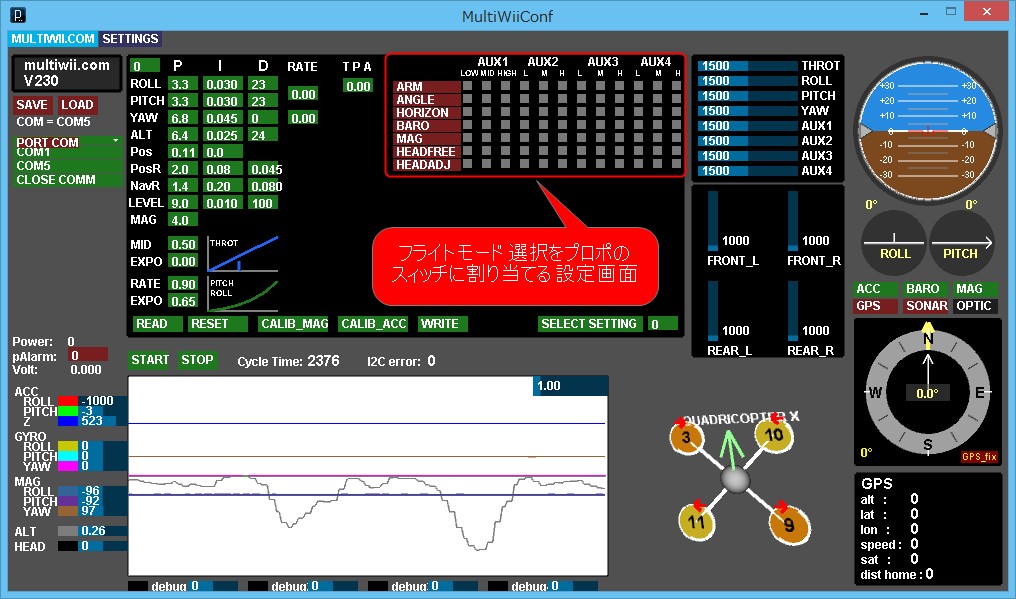
- フライトモードの選択はQuadCopter機体とPCを接続(FTDI、BTなど)し設定ソフト(MultiWiiGUIなどのフリーソフト)で行います。モードは固定ではなくてプロポのスイッチで割り当てを決めます。例えば3点スイッチを(奥:ACRO、真中:ANGLE、手前:HORIZON)などの様に。(下の画面はMUltiWiiConfigurationアプリのものです)
- 飛行場にPCを持っていくのは大変なので、今回はAndroidスマホと設定アプリ(MultiWii EZ-GUI)にてBluetooth(BT)接続して設定を変えてます。
- このアプリ秀逸でしてフライト中もモニタリングしてくれます、英語ですが音声ナビも付いててとても便利です。
2.フライト手順
今回の初フライトでの手順をメモ代わりに書き留めておきます。
- 電源オンし機体を水平な場所に置く。
- スマホアプリ起動(MultiWii EZ-GUI)しBT(Bluetooth)経由でFCと接続確立。
- 加速度センサーキャリブレーション:EZ-GUI画面から[MW Seting]→[Calibration]→[AccCalibration]と順番にタッチさせるとACC(加速度センサー)のキャリブレーションが実行されます。10秒タイマーが表示されますが実際は1秒もかからずに終了します。
- MAGセンサーキャリブレーション:同じくEZ-GUIからMagCalibrationをタッチ、30秒で終了
- フライトモード設定:デフォルトはACROモードですが最初はANGLEモードまたはHORIZONモードが絶対にオススメです。(尚フライト中でもプロポスィッチでいつでも選択できます)
- アーミング:「スロットル・スティック最下端」+「ラダー・スティック最右端」でプロペラ回転開始、MultiWiiファームウェアのConfig.hで設定したMinThrottle値で回転します。今回は1150(単位はusでPWMパルス幅の値)
- スロットルアップで離陸開始しますがBaro(気圧センサー)モードをオンさせてないと自動高度維持が働かないのでスロットルで絶えず高度調整する必要があります。逆に離陸前にBAROモードオンさせてるといつまでたっても低空飛行のままです。使い方としては、希望の高度になったらBAROモードオンさせるということです。(この点はPhantomとは大きく違います、そもそもスロットル・ステックがセンタリングという考えでは無いです)
- 着陸方法はまだ探せてませんので今のところ地面激突かハードランディングです。
後記:機体組立手順、配線方法、MultiWiiファーム書き込み&設定方法などを今後詳細に記事アップしていくつもりです。
以上