

GPSボードを搭載してのフライトに行ってきました、結果は大満足。前回までのGPS未搭載時のフライトに比べて非常に安定してます。これでやっと腰を据えてPIDチューニングに入れます。前回から変更した点は。
- GPS搭載:CRIUS Neo-6Mを取り付けました。
- ペラサイズダウン:9インチ(9045) ⇒ 8インチ(8045)
- ボードレイアウト変更&リポ電池位置変更
GPSだけの効果ではなくて、ペラサイズダウンとリポ電池位置変更による重心位置ダウンの両方も影響しているかもしれません。(でも、未検証なのでがでなんとも言えずです)
フライトモード設定について
動画中の字幕にも一部書いてますが文章で補足します。
離陸時
- 離陸時:ANGLEモード+MAGモード+GPS HOLDモード
- 離陸直後(高度5m程度):上記モードに加えてBAROモードオン
としてます、このBAROモードをオンさせないとスロットルワークのみで高度維持させないとならなく高度な操縦技術が要求されます。
BAROモード
BAROモードオンのまま離陸も一度トライしましたができなくはないです、しかし上昇速度が緩慢で地上スレスレホバリングが長くなるのでストレスが溜まります。(なのでその後はやってません)
BAROモードオン時のスロットル・スティックとモーター回転数の関係がまだつかめてません、オーバーライドはするようですがPhantom2の様な豪快な上昇はできてないです。今後はネットでの調査と実機フライトでの両面で詰めて行く予定。
着陸時
BAROモードオンのまま、スロットル・スティックを最小に絞ると徐々に降下してきます、でも自動着陸するわけでもないので地上に着地した瞬間を狙ってBAROモードをすかさずオフさせます。これでモータ回転がアイドリング状態になるのでほっと一安心。
ANGLEモード/HORIZONモード/ACROモード
ACROモード、ANGLEモード、HORIZONモードの三択ですが水平飛行に対する安定度があるANGLEモードでとりあえずフライトしてみました。MuliWiiWikiにはANGLEモードはそのうち無くなりHORIZONモードになるということなので慣れてきたらHORIZONモードに移行予定です。
ちなみに、ANGLEモードはピッチ・ロールの各スティックの傾き角度と機体の傾き角度が比例関係になるモードとのことです。(Phantom2にはモード選択が無いのですが操縦した感触ではこのモードみたいです)
HEAD FREEモード
動画には収めてませんが、モードオンで素直に効いてました。但し、このモードオンのままですとディスアーミングができませんでした。
GPS HOMEモード
まだ躊躇してます。いわゆる自動操縦の部類なので慎重になってます、GPSHOLDモードでのフラウと操作に余裕ができてきたらトライの予定。
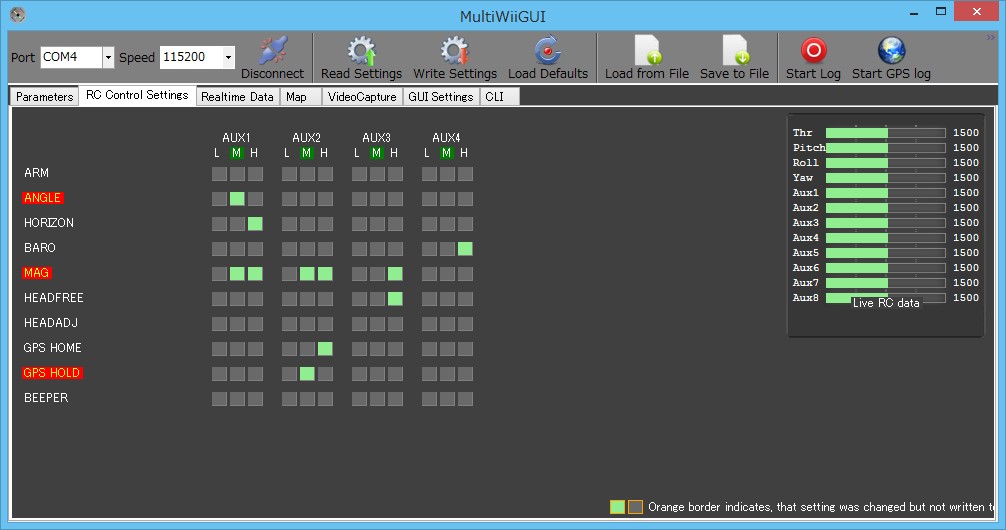
AUX1~AUX4でのモードアサイン
下の画像の様にとりあえずやってみました。
プロポのスイッチアサインは以下の様にしました。
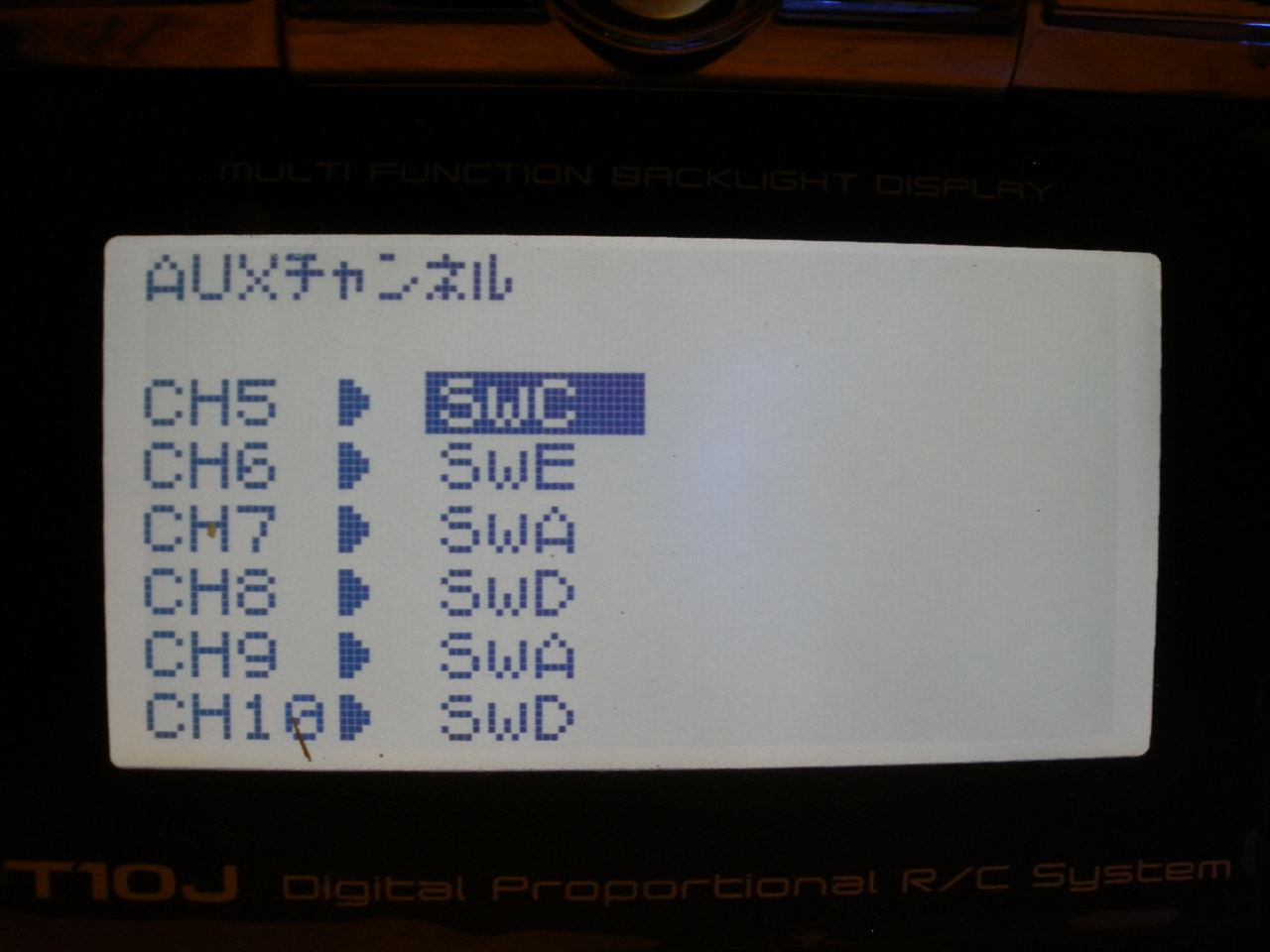
フライト中にもスイッチアサインを忘れないようにプロポにメモを貼ってます。
