

マルチコプター3号機のX525の製作を始めました。FC(フライトコントローラ)には以前から興味津々のArduCopterを使います。
このArduCopterはAutoPilotに主眼を置いている様でしてGoogleMapを使いWayPoint設定をしてそのルートをなぞってフライトさせるとか、またルート途中で一時停止してカメラアングルをコントロールすることなども可能と、まさに自動空撮機です。(なんだかとてもワクワクしますね。)
ということでマルチコプター3号機製作の始まりです。まずは例によって購入部品の紹介を兼ねて自己記録用にメモっておくことにしました。
この3号機はジンバルも取り付けて空撮チャレンジ機に仕立て上げようなどと考え中です。
ちなみに、2号機のHJ450の方は操縦訓練用機体としているのでジンバル取り付けは考えてないですし、まだまだ現役継続していきます。
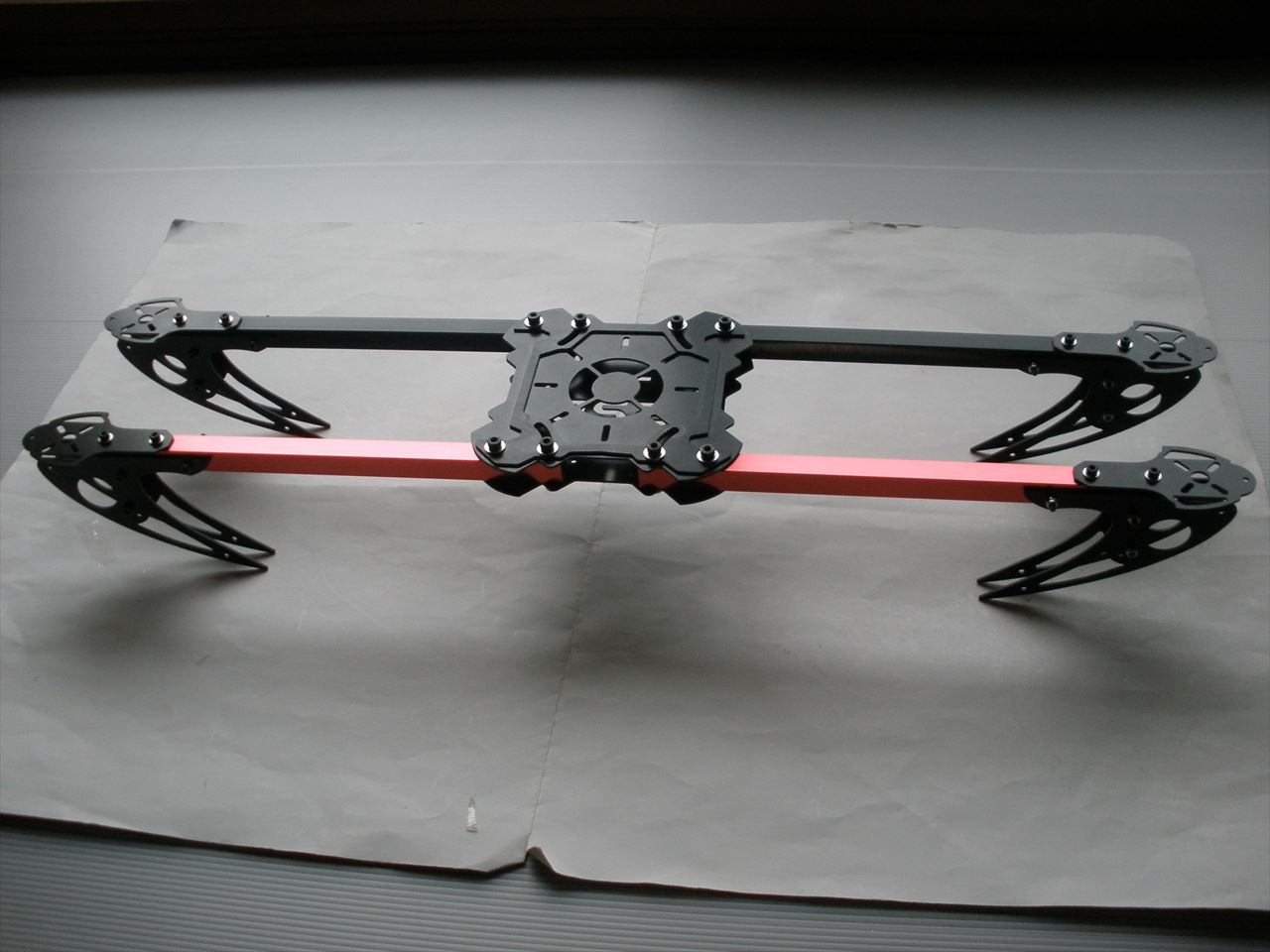
フレーム
X525V3という軸間525㎜のフォールディング・タイプのフレームです。
- アームは単なるアルミ角材(12.5㎜角x1.0mm厚x250㎜長)
- センターボードは1.6㎜厚のグラスファイバー
- 軸間525mm
- センターボードには電源分配用パターンは無いです
Amazonで購入(2,649円、送料無料)—ヤフオクみたいですが写真に写っている物だけです。
手作り感がいっぱいの品物ですが特に大きな問題はないです。(高級感は無いのですが低価格なので★5でも良いと思います)
フォールデッド
センターボードにアームを固定しているM4ネジを緩めることでフォールドできます。
センターボード部

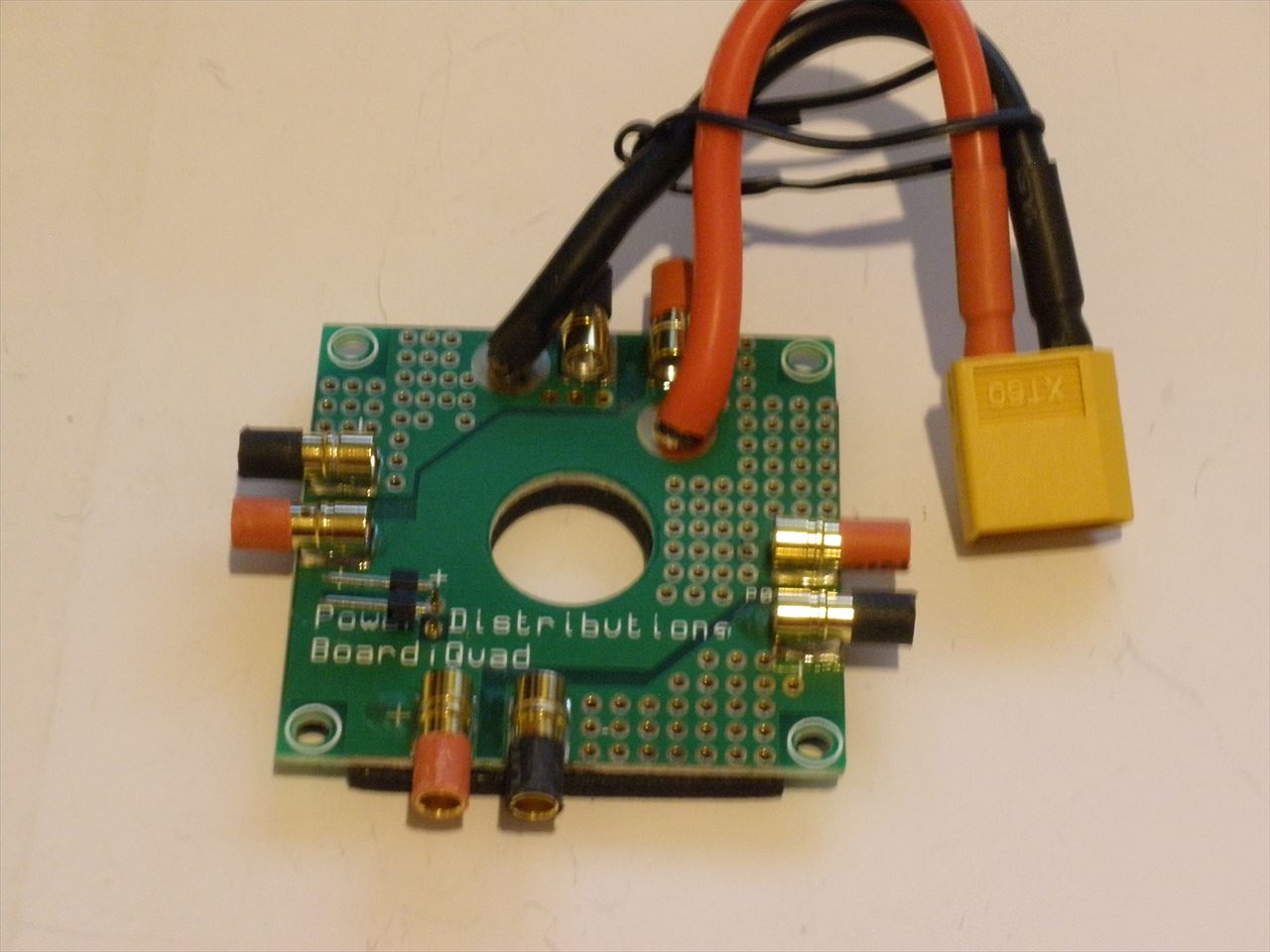
電源分配ボード
リポバッテリーから4個のアンプに電源を供給するための物ですがこれは必須アイテムではなくて、別に4分岐ケーブルを作ればそれで事足るのですが、有れば太い配線を引き回すことが不要になるのでスッキリします。
ヤフオクで880円で購入。
FC(フライトコントローラ)&周辺部品
APM2.6
本家(3DR)品ではなく中国製の互換品です。そもそもOpenHardwareと言って回路図も公開されているのでコピー品という表現はおかしいのでとりあえず互換品と言っておきます。(互換品という言葉もしっくりこないですが)
GPSモジュールとのセット品でGoodLuckBuyから$65.57(送料込み)で購入しました。(GoodLuckBuyについては後で詳細を書きます)
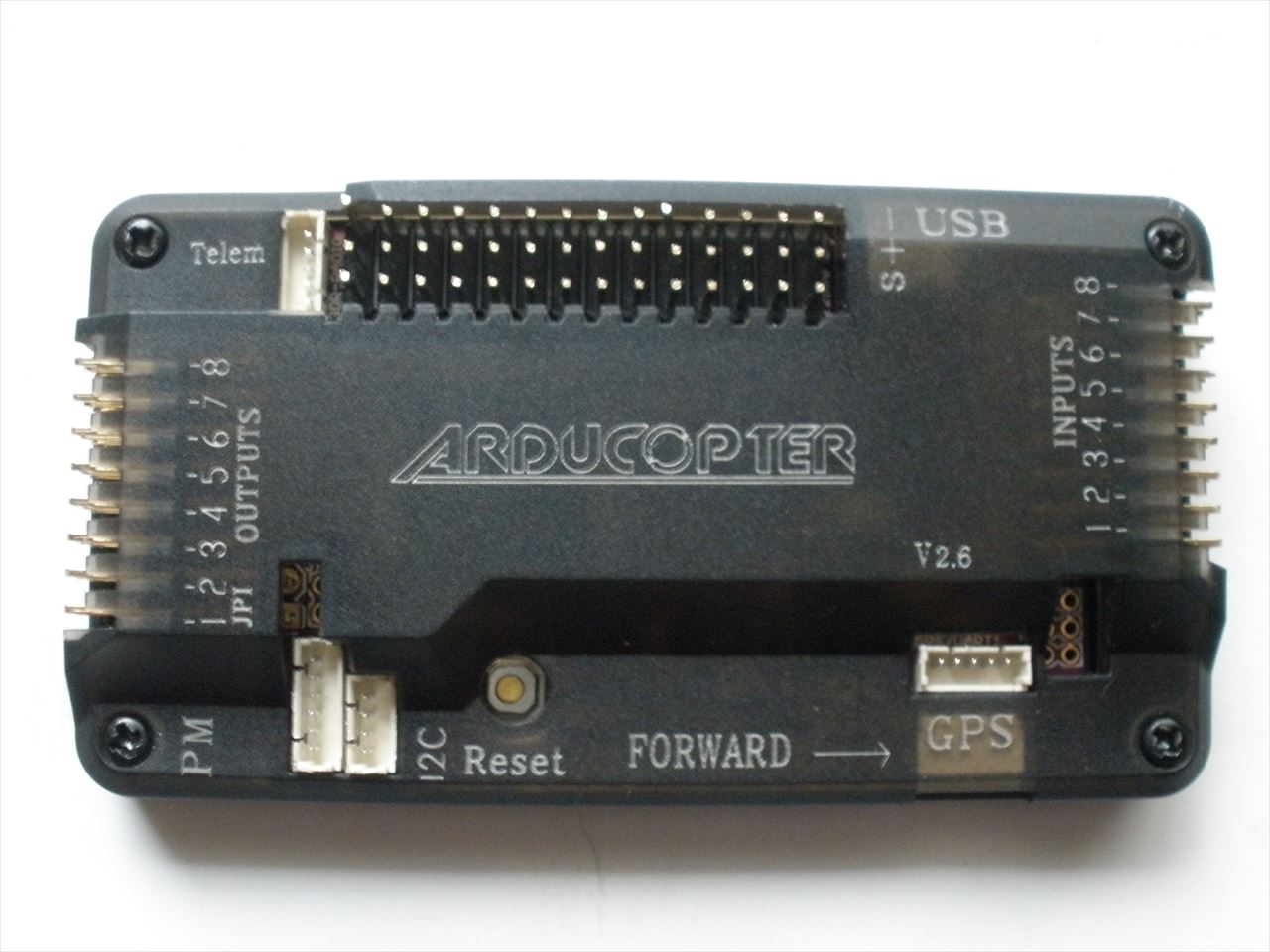
このFCは見た目には立派なケースが付いているのですが性能的にはMultiWiiと同レベルの能力しかありません、というのは搭載CPUが Atmega2560というAVRでして現HJ450搭載FCのMultiWiiSEと同じ8bitRISC@16MHzのCPUです。メモリ容量は256KByteで MultiWiiSEのAtmega328Pの32KByteからは増えてます。しかし、ArduCopterの高機能に8bitCPUというのは少々無理がありますね。
ちなみにMultiWIiPro(通称AIOP)は同じくAtmega2560搭載です。
センサーはMPU6000(3軸加速度+3軸Gyro)、MS5611(Baro)が搭載されてます。加速度+Gyoの方は違いが無いのですが、BaroについてはMultiWiiSE搭載はBMP085ですのでセンサーの違いがフライトにどう出るのかが興味ありですね。
MAGセンサー(電子コンパス)は未搭載ですが、このセンサーは外部電界に弱いのでオンボードでない方がFCボードの搭載位置の自由度が上がるのでGood。尚、MAGセンサーは同時購入のGPSモジュールに内蔵されてます。
あと便利そうなのがフライト・ログ記録用に4MByteのフラッシュがオンボード搭載です、フライト後にログ解析がPC上でできるそうです。(すぐにでもトライしてみたいです。)
【参考情報】主流はPixhawk/PX4に移行
タイトルのPixhawk/PX4はArduCopterサポートFCのことですが、こちらは32bit ARM CPU搭載で高性能版です、クロックもメモリも全然違いますねAtmegaシリーズとは。(ここのページに詳しく書いてあります)
実は主流はすでにこちらに移行している様でしてArduCopterファームもv3.2がAPM2.6(8bitAVR)サポートの最終バージョンとのことです。(ArduCopterWikiのこのページの「Pixhawk vs APM2.6 vs PX4」のChapterに記述有りです)
この32bitFCの難点は高価格、互換品ですら軒並み$120を超えてます。本家の3DR(USA)では$199です。(中国頑張れ!)
でも、上記ページをよく読むと下の方に次世代FCのことがちらっと書いてありますAPM4.0(Pixhawk Fire)というらしくてLINUXベースだそうです。
とはいえとても魅力的なので$100ぐらいまで下がったら買おうかなと考えてます。
GPSモジュール(MAGセンサー付)
 GoodLuckBuyからAPM2.6とのセット品で買ったものです。中味は、
GoodLuckBuyからAPM2.6とのセット品で買ったものです。中味は、
- GPS:uBlox製Neo-6Mモジュール
- MAG:内蔵しているのですが型番は不明、ケースの殻割すれば判明するでしょうが未だ開けてませんです。
- 取付用の金具、バーも付属してますがハードランディングしたらすぐに壊れそうなぐらい華奢な感じです、しかもバーの径が金具内径より小さいのでユルユルだし、追加工必至です。
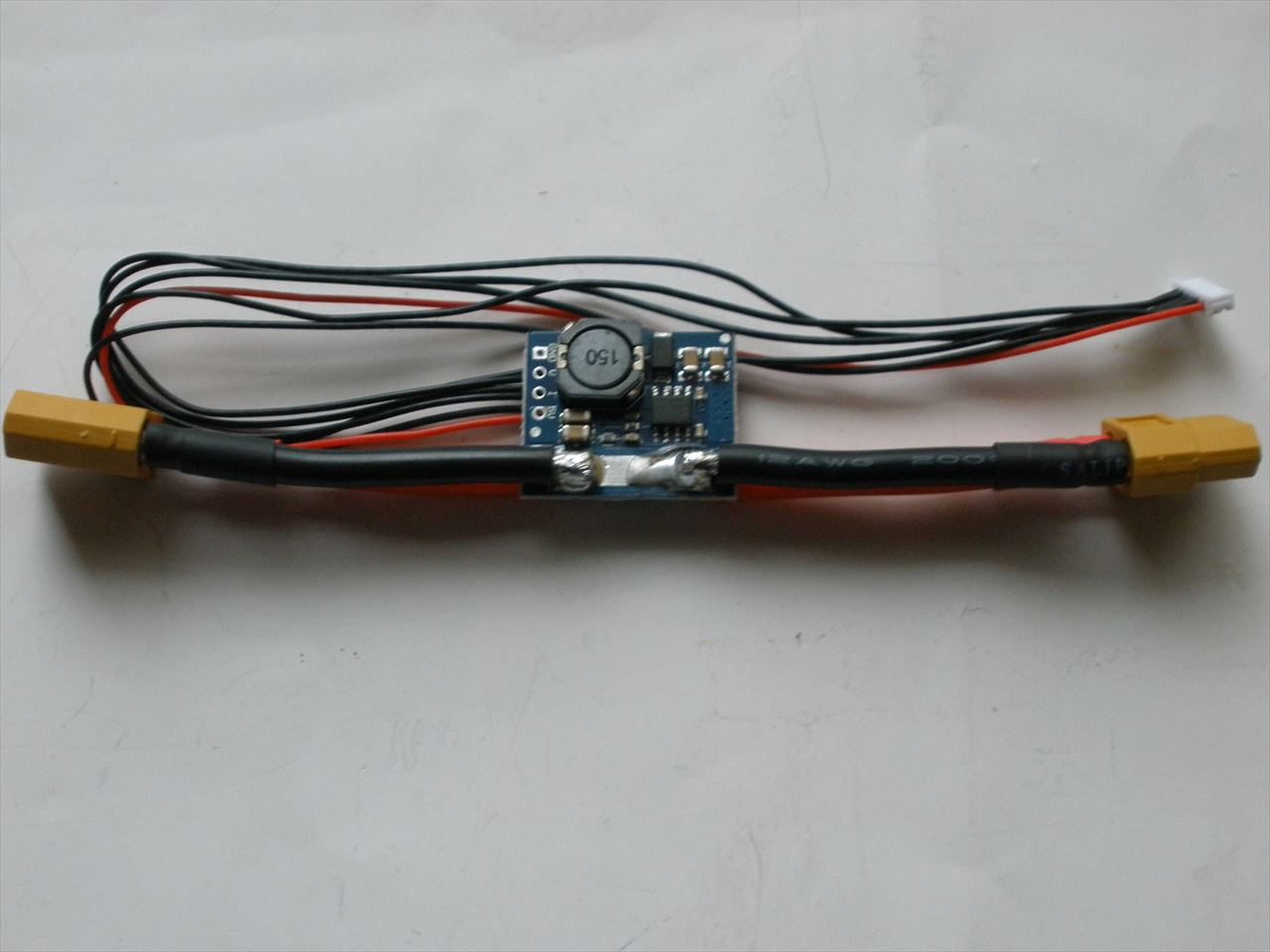
電源コネクター・BEC&センサー内蔵
APM専用ということでこれもGoodLuckBuyから$7.21(送料込み)で購入。
- SBEC内蔵:5.3V/3A max
- 電圧・電流センサー内蔵(APM2.6で検出できるようです)
- メイン電源:XT60/90Amax(本当に大丈夫90Aも、という感じですが最大値だし、そんなに流さないし)
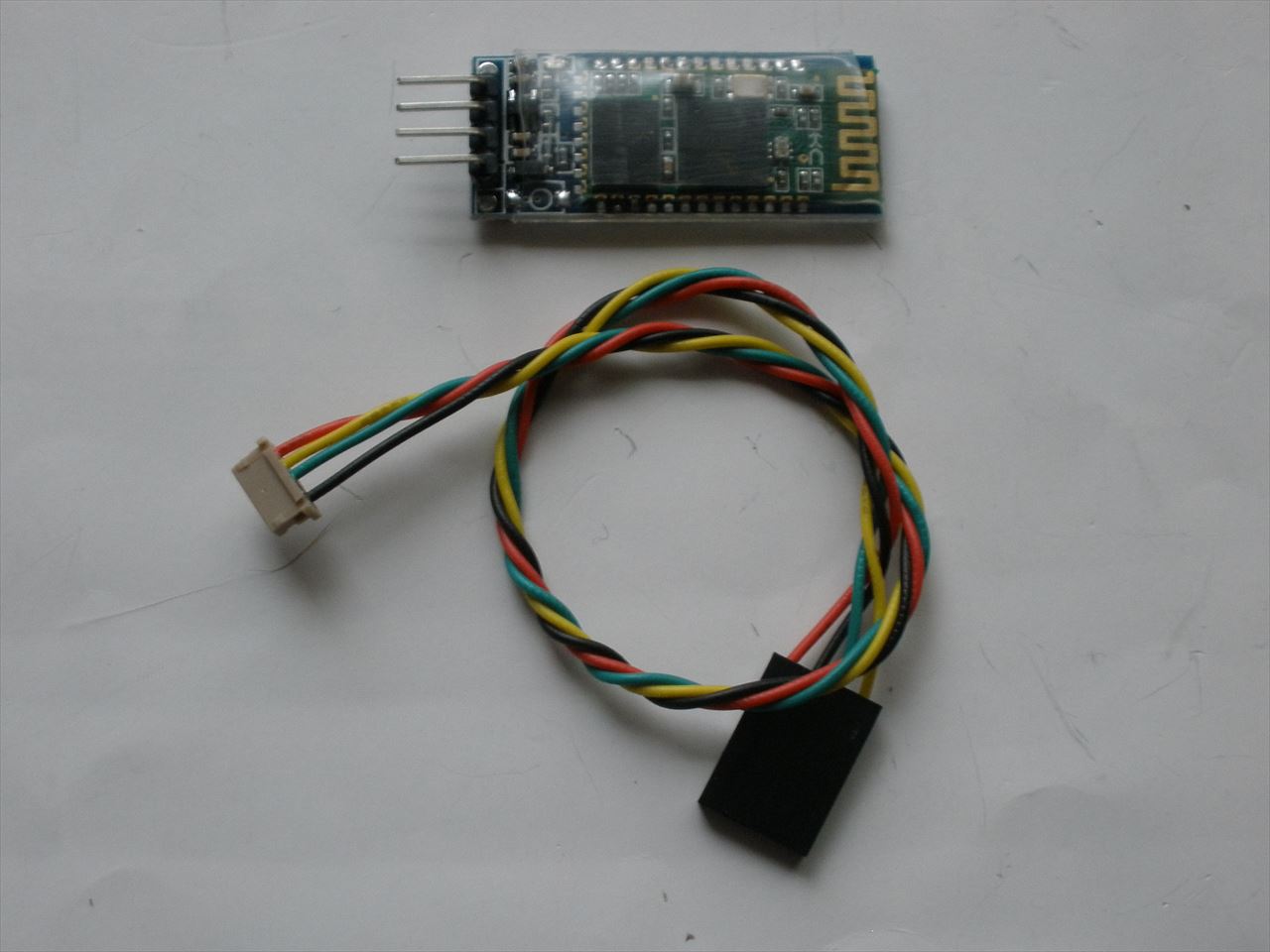
BTモジュール
APM専用ということでこれもGoodLuckBuyから$9.02(送料込み)で購入。どこがAPM2.6専用かというとケーブル&コネクタがそのまま刺さるとのことのようです。BTモジュールボードそのものは手持ちの物ととおんなじです、中国のどこかのメーカーが大量にOEM生産してるんでしょうね、きっと。
- DefaultBaudRate:57600bps
- PINコード:”1234″
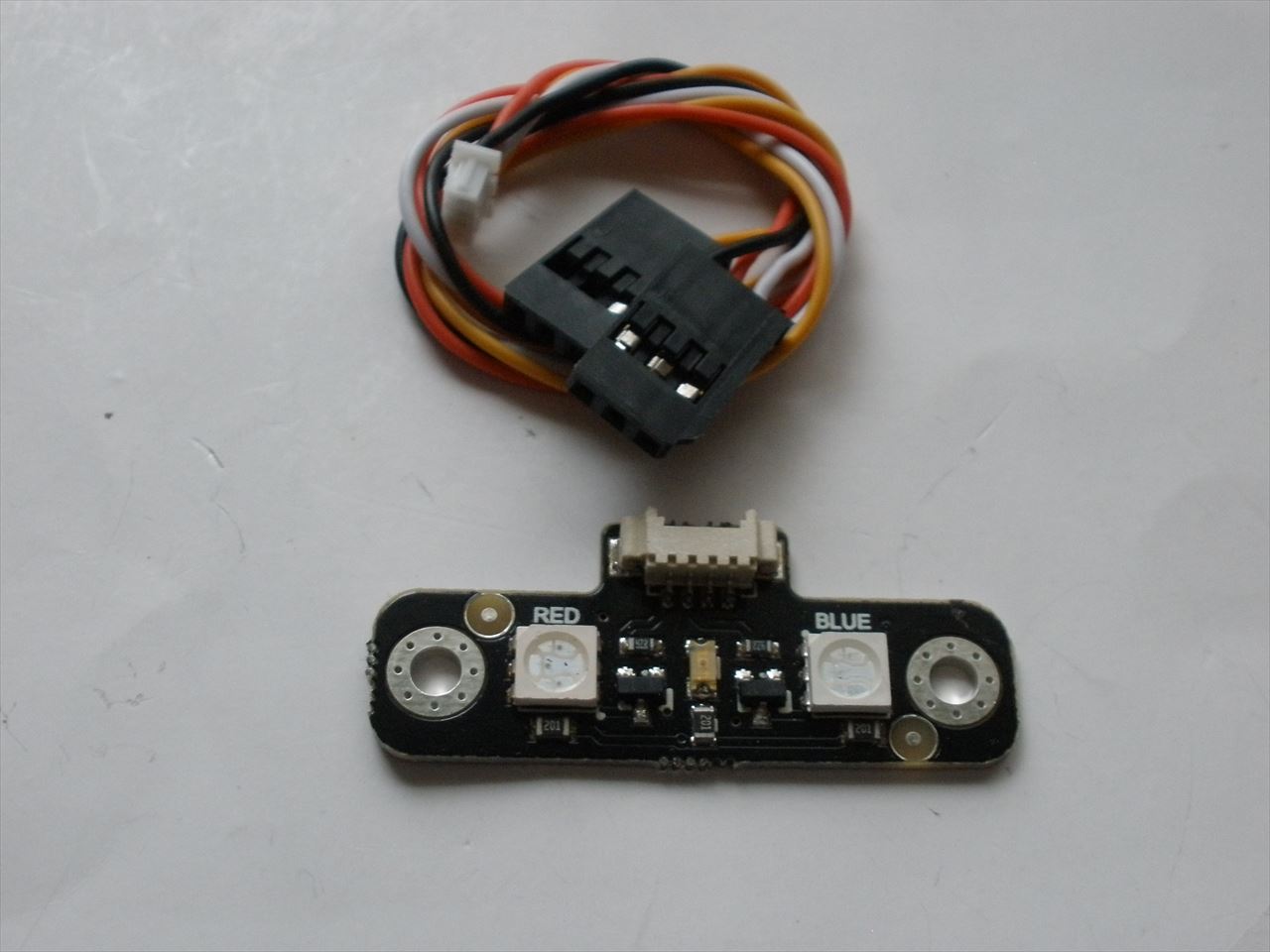
LED拡張ボード
これもGoodLuckBuyから$4.59(送料込み)で購入。
FCオンボードのLEDが見にくいので外部に引き出すためのものです、どなたかのブログでとても有用みたいなことを読んだ記憶が有りあまり考えずに購入決定。
防振ダンパー・プレート
MyRcMartから$2.99で購入。
防振効果のほどは使ってみないとわからないのですが、最悪センターボードへの取付がスッキリするという効果は期待できます。

ブラシレス・モーター
RCX製BE2212-13(880KV)をヘリモンスターから1,834円(税込)で購入。(4個購入7,336円+送料510円)
HJ450で使用している2212クラスのブラシレスで更にコレットタイプだとゆるんできて抜け落ちる心配が付きまとうのでネジ留めタイプ(DJIみたいな)をネットで物色してRCX製BE2212-13(880KV)に落ち着きました。
 このモーター、RCXHobbyという会社の製品とのことなのですがメーカーサイトには製品情報が全然なくて、更に偽物注意のNoticeが同メーカーサイトにはあります、もしかしたら偽物を買ったのかと思ったら、メーカーサイトが推奨している販売会社のMyRcMartには商品があり、更にヘリモンスターから購入した物は、MyRCMartの物と同じ型番なので大丈夫みたいです。(MyRcMartはRCXHobbyのAuthorizedSllerだそうです)
このモーター、RCXHobbyという会社の製品とのことなのですがメーカーサイトには製品情報が全然なくて、更に偽物注意のNoticeが同メーカーサイトにはあります、もしかしたら偽物を買ったのかと思ったら、メーカーサイトが推奨している販売会社のMyRcMartには商品があり、更にヘリモンスターから購入した物は、MyRCMartの物と同じ型番なので大丈夫みたいです。(MyRcMartはRCXHobbyのAuthorizedSllerだそうです)
BE2212-11という1000KVの物もありますが、ペラ径を大きめにしたくて880KVをチョイス。(というか1000KV品はヘリモンスターにはおいて無いのです)
ESC
HobbyWingのX-ROTOR-20AをMyRcMartから$9.99で購入。
MultiCopter専用のESCとしてGoodみたいあ記事の振れ込みで購入、
- プログラミング項目がタイミングしかない
- BEC無し(OPT仕様ということです)
- モーター出力側にケーブルが無くてバナナ・ダイレクト出力
ということでシンプルなんですね。

購入品リスト&購入先
ということで、最後にまとめてみました。
リスト
| No. | 品名 | 価格 | 個数 | 購入先 |
| 1 | X5252V3フレーム( Quad Copter) | ¥2,649 | 1 | Amazon |
| 2 | 電源分岐ボード | ¥880 | 1 | ヤフオク |
| 3 | フライトコントローラ APM2.6 | $65.57 | 1 | GoodLuckBuy |
| 4 | GPSモジュール(MAGセンサー付) uBlox Neo-6M | ↑ | 1 | GoodLuckBuy |
| 5 | BTモジュール | $9.02 | 1 | GoodLuckBuy |
| 6 | 電源モジュール(SBEC付) | $7.21 | 1 | GoodLuckBuy |
| 7 | LED拡張ボード | $4.59 | 1 | GoodLuckBuy |
| 8 | 防振ダンパー・プレート | $2.99 | 1 | MyRcMart |
| 9 | ブラシレスモーター RCX BE2212-13(880KV) | ¥7,336 | 4 | ヘリモンスター |
| 10 | ESC HobbyWing X-Rotor-20A | $39.96 | 4 | MyRcMart |
合計=¥10865+$129.34=¥26,256(1$=119円)
購入先
GoodLuckBuy:
中国・上海(多分)の通販専門店です。ラジコン以外の物も扱ってて商品数が多いので探すのが大変です、事前に商品名とか型番を他で調べておいた方が良いですね、それとサイト内の商品情報はどこかからのコピペyという感じです、とにかく安いのと殆どの商品が送料無料です。但し送料無料はトラッキング情報がないので、有料($2.5)のトラッキング情報有りで注文しました。
納期は2014/12/7に発注、手元に来たのが12/16と9日なので思った以上に早かったです。尚、支払はPayPalを使用。
MyRcMart:
中国・上海のラジコン専門通販ショップでしてサイトの作りはしっかりとしてて情報も専門店らしく信頼できる感じです。ヘリ、マルチコプターがメインの店の様です。価格も総じて安くてリピーターになりそうです。送料は無料ではなくてしっかりと取られます、国際EMSらしくて重量で価格が決まるようです。今回は430gで$13.85かかりました。(この記事で紹介したもの以外も購入してます)
ヘリモンスター:
土浦にある日本の通販専門店で、MyRcMartの物と同じ物がおいてありますMyRcmart並みに低価格なのでモノによってはここで買うのが一番と思います。納期が早いし、送料もメール便対応してくれるので安く上がります。
今回はここまでにします、次回は実際の組立です、多分ArduCopter設定になるかと思います。
初めまして、マルチを自作して飛ばしているものです。
ニャーハンドさんの記事非常に参考になります。私もこれまでMultiwiiAIOでクワッドを飛ばしてきましたが、arudpilot?のほうが素晴らしそうだとのことでニャーハンドさんと同じ構成で今作成しています。
そこで教えていただきたいことがあります。ペラのサイズとbluetoothが接続になりません。comportを指定しろと出ますが、どこをどうすればいいのか???です。教えてください。
かたもとさん、はじめましてブログ管理人のnyan#2です。MultiWIiAIOで飛ばしてたんですね、当方のMultiWii機は最近ほとんど出番がなくてArduCopterがメインです、と言っても連日の暑さでそもそものフライトの方もご無沙汰状態です(笑)。さて本題の方ですが、まずはペラサイズですが、Gemfan製の9×4.7を使用してます。(購入はKKHobby)、このサイズですとジンバル搭載では少々パワー不足の感じがしますね。とは言え、今はこのサイズでガンガン飛ばしてます。ちなみに既に取り外しちゃってますがカニ足スキッド(300g程度)では全く非力でした。重すぎです、スロットル位置が真ん中では下降します。更に、ラダーを切っても下降する始末でした。まあ、これもカニ足スキッドを外したら全然良くなりましたが。一応試しにと思い10×4.5ペラも購入済なんですがいまだに未フライト。だいぶ長文になったのでBluetooth接続の方は別コメントで書きますね、少々お待ちください。
さて続きのBluetoothの方です、接続不具合で思いつくことを上げてみました。
[APM2.6フライトコントローラボードとBluetoothボード間の通信]
①「Serial通信速度が合ってない」⇒APM2.6のTelem1ポートの通信速度は57600bpsがデフォルトなので、Bluetoothボードの通信速度もこれに合わせる。ネット情報ですと9600bpsとか112500bosに工場出荷時設定されていることが多いみたいです。自分の場合はAPM2.6用の物を購入したので最初から57600bpsになってました。Bluetoothボードの通信速度を変更するにはU-Center評価ツールでできるのではないかと思います。(スミマセン未確認です)、またはBt_config でも可能かと思います。(こちらのソフトはMultiWIiのBTボードで使ったことあります。)、いずれにしてもWindowsでのソフト(無料)になるのでUSB-Serial変換モジュールが必要です。
②「TX,RX結線がクロスになってない」、APM2.6 Telem1のTX信号⇒BluetoothボードのRX信号、逆にAPM2.6のRXをBluetoothボードのTXに接続する。
③ちなみにAPM2.6のUSBケーブルが接続されているとTelem1での通信はできなかったように覚えてます。(BT通信時はUSBケーブルは外す)
以上、「COMPORTを指定せよ」とのメッセージということでAPM2.6とBTボード間の通信不具合と仮定して書きました。ところで「COMPORT指定せよ」のメッセージはMissionPlanner上の表示ですか? その辺のところを詳しく教えてもらえるともう少し絞って書けると思います。
nyan#2さん早速の詳細な解析方法ありがとうございます。
さて、現状ですがBT_config.exeでPCとbluetoothモジュールの通信は可能で57600bpsでATコマンドの反応はありPINを1234、nameをardupilotに変更も正常に書き込みができました。
TX,RX結線がクロスにつなぎましたが、特に変わりはありませんでした。
missionplanner1.3.2.0を起動しinital setup>optional hardware>bluetooth setupを選択しname=ardpilot,pin=1234,baud=57600にセットされているのを確認後save settingボタンをクリックで”please select a comport”とダイヤログを表示します。
コントローラでもうひとつのcomportを設定しなければならないのでしょうか?その設定場所が探しては見たのですがよく分からないのです。
ほかにもお聞きしたいことがありまして・・・
よろしくお願いいたします。
かたもとさん、
BTModuleの設定OKは確認済と言うことですね、了解しました。MissionPlanner上でのBTModule設定(InitialSetup > OptionalHardware > BluetoothSetup))でのエラーメッセージ [Please select a comport]はこちらでも再度やってみたら同じように表示されますね。でも、接続はうまく行ってます。ただ、こちらではMissionPlanner起動のPCによりBT接続がうまく行かないケースがありました。メインPCはWin8.1(DeskTop)なんですが、これで接続するとうまく接続できませんでした、XP搭載のノートPCでは問題なく接続できました。Win8.1の接続不具合はそのままで深追いしてないので良くわかりません、今もうまく接続できないです。とりあえずXPのPCでうまく行ってます、XPでの詳細は以下です。
①WindowsXP(SP3)
②MissionPlanner V1.3.30
③MissionPlannerのCOMPORTの通信速度115200bps(57600bpsでも接続OK)
④XP・PCのBT(USBタイプ):Planex製、BT-MicroEDR2X
⑤APM2.6のTelemコネクタとBTModuleを接続。(SaveSettingで同じエラーメッセージが出ますがとりあえずこの接続でうまく行ってます。)
それ以外の質問事項はなんでしょうか?
かたもとさん、
一つ書き忘れてました、PC(XP)の方にはTOSHIBAのBTユーテリティというのをインストールしてあります。このユーテリティのヘルプ画面によると正式名称は「Bluetooth Stack for Windows by Toshiba, Version6.00.05」です。よく覚えてないのですがPlanexのUSBタイプBTモジュール購入時についてきたものだと思います。それに対し、Win8.1PCにはこれはインストールしてないです。Win7以降は未サポートという話を聞いたのでインストールしてないのですが、今ネットで見たらサポートしてるという記事もありました。とりあえずXPで対応できてるので未インストール状態です、もしかしたらこのTOSHIBAユーテリティをWin8.1にインストールすればうまく接続できるのかもですが未確認です。ではとりあえずここまでです。
Win8.1のPCにTOSHIBAのBluetoothStack(Win8.1サポートバージョン)をインストールすることで問題なくBT接続できるようになりました。
①Bluetooth Stack for Windows by Toshiba v9.10.32(T)をTOSHIBAのDynabookサイトからダウンロード&インストール。(http://dynabook.com/assistpc/download/modify/soft/btswt/index_j.htm)
②MissionPlannerはV1.3.30、COMポート通信速度は115200bpsに設定。XP時と同様に57600bpsでも接続OKなのでこの通信速度はあまり気にしなくてよいようです。
③APM2.6サイドは特に設定変更はしてない。
結論的にはWin8.1にはマイクロソフト製のドライバーが搭載されているようですが、これではうまく接続できないという結果ですね。以上
nyan#2さん。詳しい説明ありがとうございます。
残念ながら私のPCはWin7しかありません。それで設定をしていきたいと思っております。
さて、その後、デバイスの切り分けとかスマホ(タブレットの代わりにスマホを使っています。Multiwiiのキャリブレーションもスマホで毎回行っております)の設定やbluetoothを使ったターミナルでPCと通信ができるかなどの試行錯誤をしました。デバイスはどれも正しく動いており、なぜかスマホのMissoinplanerではBluetooth接続ができません。試しにDroidplanner2をインストールしたところ、bluetooth接続ができるようになり画面上もそれなりに表示するようになりました。
結局、コントローラーもPCに繋いでいたり、Missionplannerとスマホの相性が悪かったりが原因のようです。
いろいろと詳しい探索方法を教えていただきありがとうございました。
キャリブレーションを行い地磁気センサーも正常に動いているのも分かりました。
もうひとつ教えていただけませんでしょうか?
拡張のLEDユニットを接続しております。それが光らないのです。コントローラにはA4とA6に接続しております。
先のコメントでMissoinplanerと書きましたが、android版のTowerの間違いでした。今はDroidplanner V2.8.6を使用しています。
スマホでは画面が小さいので設定等で表示できないものがあるかもしれません。やはりタブレットが必要かな?
とりあえずは先に進んだということでよいのでしょうかね、でも文面からはMissionPlannerとAPM2.6間のBluetooth接続がまだダメっぽいようですが。一つ前のコメントに書いたように、もし時間が有ればToshibaのBluetoothStauckをお試しあれ。Windows7以降はこれで改善すると思うのですが、USBタイプのBTがTOSHIBAチップ以外は使いえないかもしれません。(手持ちのUSBタイプBTはTOSHIBAチップの模様。)
さて。拡張LEDユニットの件ですが、こちらではA6、A7に接続しています。APMサイトのExternal LED(http://copter.ardupilot.com/wiki/common-optional-hardware/common-external-leds/)の説明では搭載ファームのバージョンで微妙に違うようです。こちらの搭載バージョンはAC3.2.1なので、A6がGPSステータスなので「青LED」が光るように、A7がArmingなので「赤LED」が光る様に接続しています。
スマホ&タブレットの話ですが、MulitiWii機を飛ばす時にはMapを表示させてのナビフライトをさせることが無かったのでスマホでも十分でしたがAPM2.6ではどちらかと言うとナビフライトがメインなのでフィールドでGoogleMapを見ながらルート設定することが多くタブレットを使ってます。タブレットはGoogleのNexus7を使ってますがWifiしか搭載されてない機種なので別途DocomoのWifiルーター経由でネット接続してます。(GoogleMapを使うのでネット接続が必須)。Nexus7はBT接続は全然問題でてませんが、スマホの方は手持ちのDocomo ブランドのFujitsuのF-02EはBTが全く繋がらず機種変前のhtc製Evo3D(au)をMultiWii機フライト時は使ってます。ということで長文になりましたが、タブレット購入時にはBT接続に注意した方がいいですね。