
MissionPlannerを使っての初期設定に進みます、まずはコントローラ・ファームの更新作業です。
ArduCopterサイトのこのページを参考にしました。(と言っても簡単な作業なので見なくてもできちゃいます)
当初、通信エラーで悩まされましたが、それも解決して順調に更新できました。(通信エラーの詳細は後ろの方に書いてます)
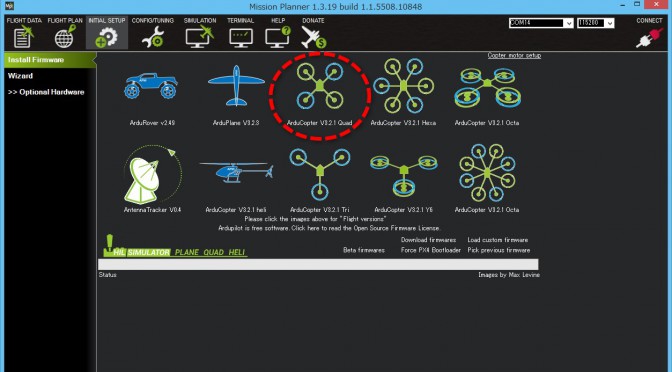
起動すると以下の画面になります、ファーム更新メニューはINITIAL SETUPに有ります。
 尚、MultiWiiではファーム更新は設定ソフトのMultiWiiConfとは別にArduinoIDEを使いましたがArduCopterはこのMIssionPlannerですべて完結。
尚、MultiWiiではファーム更新は設定ソフトのMultiWiiConfとは別にArduinoIDEを使いましたがArduCopterはこのMIssionPlannerですべて完結。
以下に、詳細手順をメモりました。
ファーム更新手順
PCとAPM2.6とはUSB接続をします。そして電源供給はこのUSB端子から行われるのでリポ電池は接続しないように。実際にはBECとAPM2.6との間のケーブルを外しました。
COMポート選択
INITIAL SETUPに入ると以下の画面になるので、①COMポート選択(ArduinoMega2560とコメントされてます)、②DISCONNECT状態を確認。(CONNECTアイコンが出ている)、③Install Firmwareをクリックと進みます。
注)②のDISCONNECT状態を確認するのがポイントです、結局ファーム更新の間は常にDISCONNECT状態でした。設定時にのみCONECTするとのことです。

対象となる機体を選択
ネットに接続して自動で最新バージョン情報を取得し、以下の画面が表示されるので、対象機種を選びます、今回はArduCopter V3.2.1 Quadです。(機体画像をクリック)

確認画面が出ます
対象機体とVersionの確認画面が出てくるのでOKをクリック

自動で更新(Uploading)まで進みます。
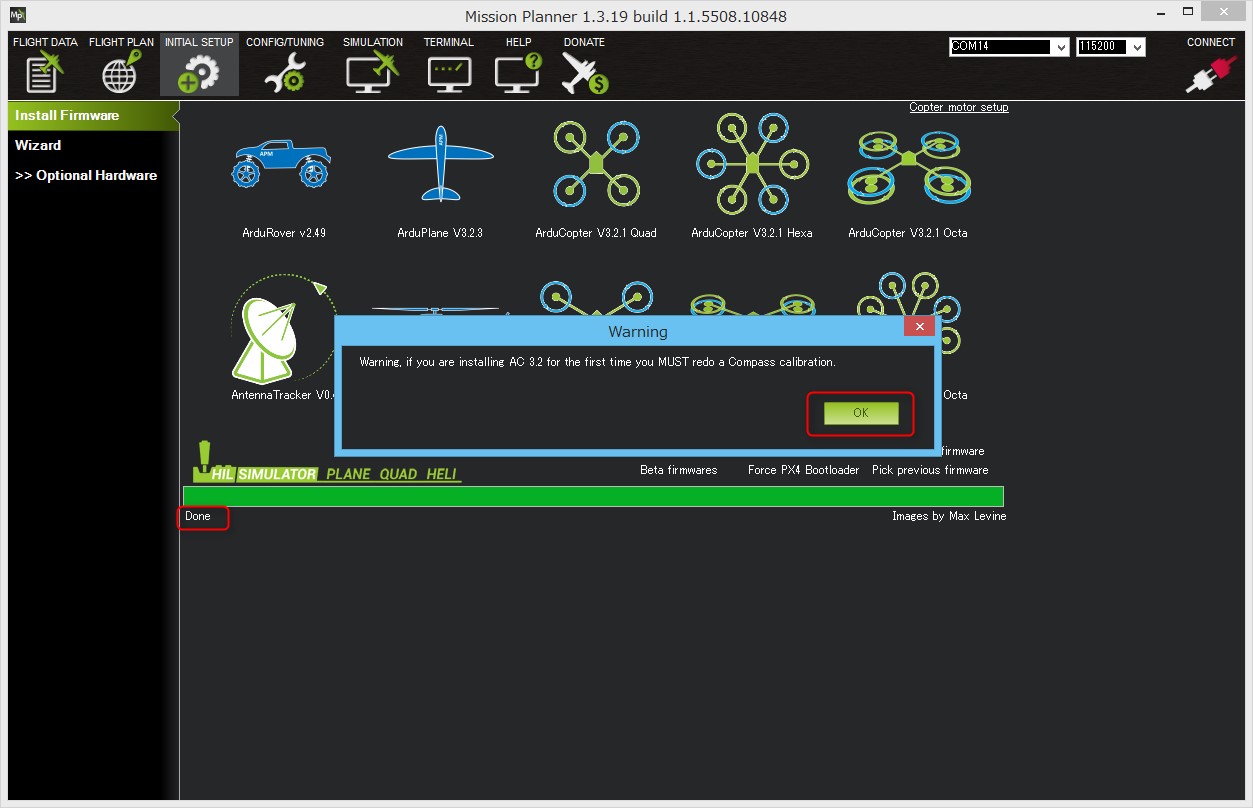
Status表示エリアにUploading Firmwareと表示され、プログレスバーも進行度合いを表示。

無事に終了
AC3.2バージョンアップした場合はコンパスの再キャリブレが必要とのメッセージが出ていますがとりあえずOKクリック。
通信エラーの対策方法メモ
実は、当初はファーム更新の途中で通信エラーが発生してうまくいきませんでした。もしかしたら購入ボードの不良かなと思いましたが念のためネットで情報を探しまくりました。

同じように通信エラーに悩まされている人がたくさんいましていつの間にか直ってしまったとか、PC変えたらOKとか情報錯綜状態でした。
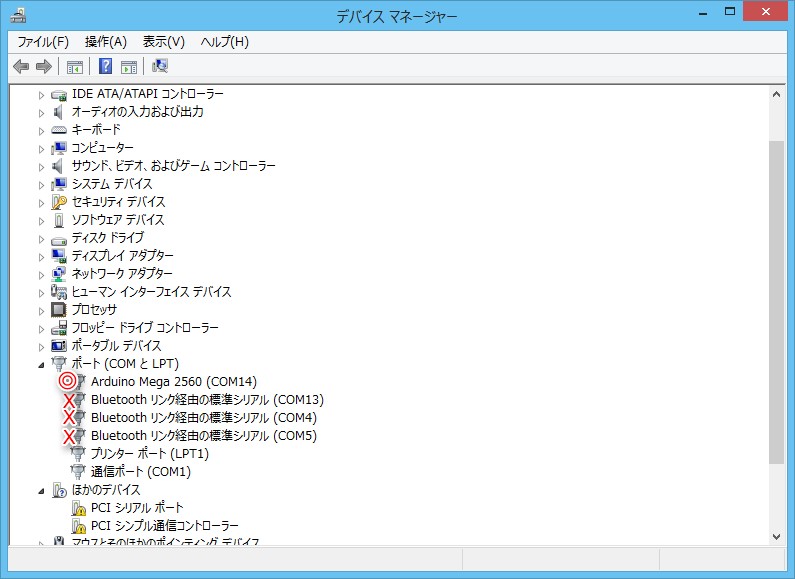
その中からAPMforumのこの方の記事が参考になり、同じように対策したところいとも簡単に直りました。
内容的には不要(未使用)なシリアルポートをすべて無効化しなさいということなので以下の様にBTの3ポートを削除。(実際にはUSB・BTモジュールを抜く)
次回は、ACCセンサー、MAGセンサーのキャリブレーションです。