

Phantom2桜空撮とHJ450・MultiWIi・V2.4とで忙しく製作は完了したものの、なかなか初フライトに行く機会が無くてずっと待機中のX525・ArduCopter機のテストフライトにやっと行ってきました。
HJ450の時はフライトモードをよく理解してなかったままいきなりアクロモードで初フライトしたのが連続墜落の原因と後でわかったので今回はフライトモードをじっくりと事前学習してから臨んだので全然問題なく、安定したフライトが確認できました。
ArduCopterのサイトに説明がある様にフライトモードを
- Stablize モード ⇒ 機体を水平維持させて安定ホバリング。
- AltHoldモード ⇒ 一定高度を維持。
- Loiterモード ⇒ GPSで水平位置を固定。
の順にやってみました。
各設定値(Parameter)はPreArmCheck用のHDOP値を2.5に変更したこと以外はデフォルトのままです。
フライトモード
APM Copterサイトのフライトモードの説明がありますが、実に沢山あります。
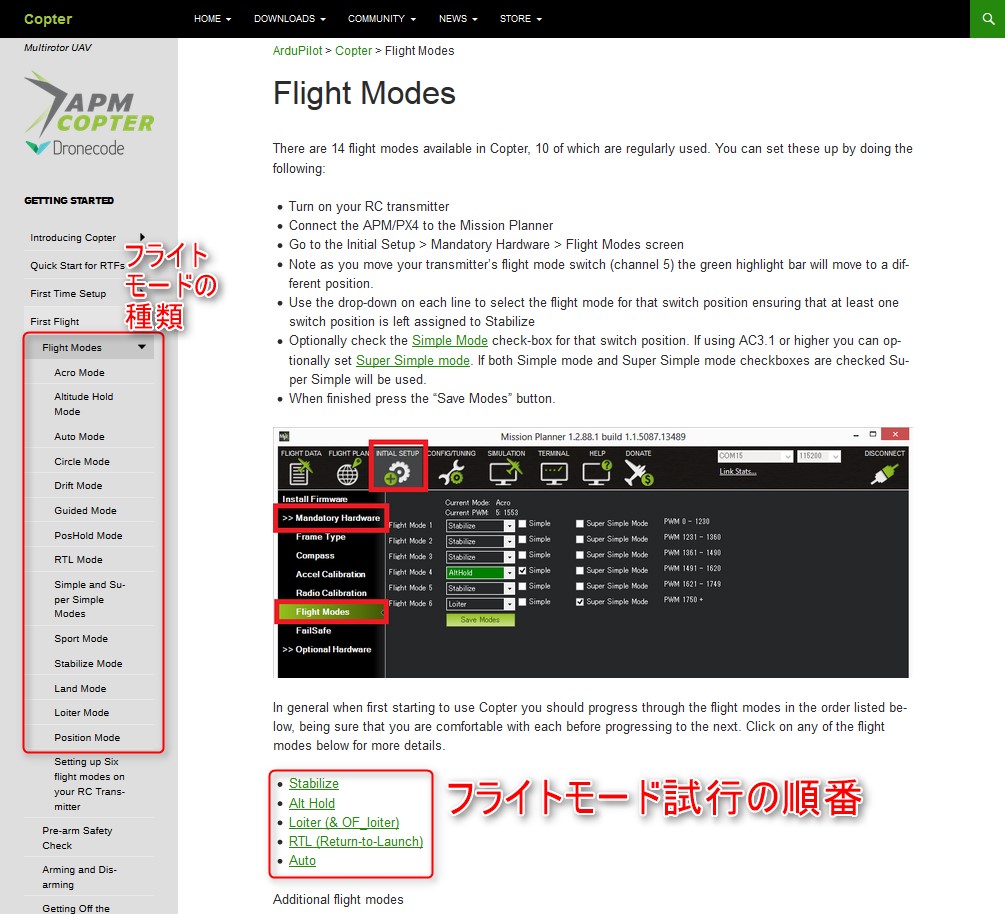
更に説明を読むとFirstFlightユーザはStablizeモード⇒AltHoldモード⇒Loiterモード⇒RTL(ReturnToLaunch)モード⇒Autoモードの順にトライせよと書いてありますが今回はまずは最初の3モードをやってみました。
Stablizeモード
MultiWiiのAngleモードに相当するもので内蔵センサー(Gyro&ACC)を使いとにかく機体を水平に保持させようと制御されます。(プロポ・ステックをセンタリングした時だけ)
プロポのステックはすべて有効なのでRoll/Pitchスティックを操作すると機体を思う方向に移動できました。そして指を離してスティックをセンタに戻すと機体は水平にすぐに戻ります。
PIDなどの設定値もデフォルトのままでしたが前後左右のハンチングは発生せず安定してました、風もそこそこあったんですが水平位置はうまく保持されてました。
スロットルも操作可能なのでそのまま上昇・下降も問題なくできましたが、AltHoldモードではないので高度を保つために絶えずスティックを操作してないとならないので少々疲れます。
但し、風があるとどんどん風下に流されていきます。なので当日はそこそこ風があり、元の位置に戻すためにこれまた絶えずスティック操作をしないとならないのでこれも少々疲れますね。
操作の感じはMultiWiiと同じです。
尚、スティックを最大に倒した時の機体の最高傾斜角度は45度(Default)に制限されてます。(MultiWiiの場合は50度)
AltHoldモード
これは名称通り一定の高度を維持させるモードでして、一つ前のStablize モードに高度維持制御が加わったというモードでした。(この辺のところはサイトの説明文には明示的には書いて無いのですが)
フィーリング的にはMultiWiiとは大きく異なりPhantom2に近く、上下動がほとんど無くてとてもうまく制御されてます。
それと、スロットル・スティックによる上昇・下降も綺麗に制御されてて、これもPhantom2に似てます。
着陸までの降下は素晴らしく、とてもスムーズに着陸できました。
Loiterモード
実際に飛ばしてみたところ、このモードはStablize モード+AltHoldモード+GPS位置制御ということになりますね。
スティックから指を離すとピタッと定位置・定高度を綺麗に保持します。
ゆっくりと移動させた後にスティック・センタリングでも後戻りすることも無く実にうまく制御されてます。
このモードでのフライトもPhantom2に近い感じでした。
HDOP値の変更について
実は、今回の前にも初フライトにトライしたんですが、PreArmCheckでHDOP値が高くてArmできず飛ばせなかったんです。
デフォルトではHDOPリミット値が2.0でして、この値がリポ電池接続して待つこと10数分経っても下がってきませんでした。
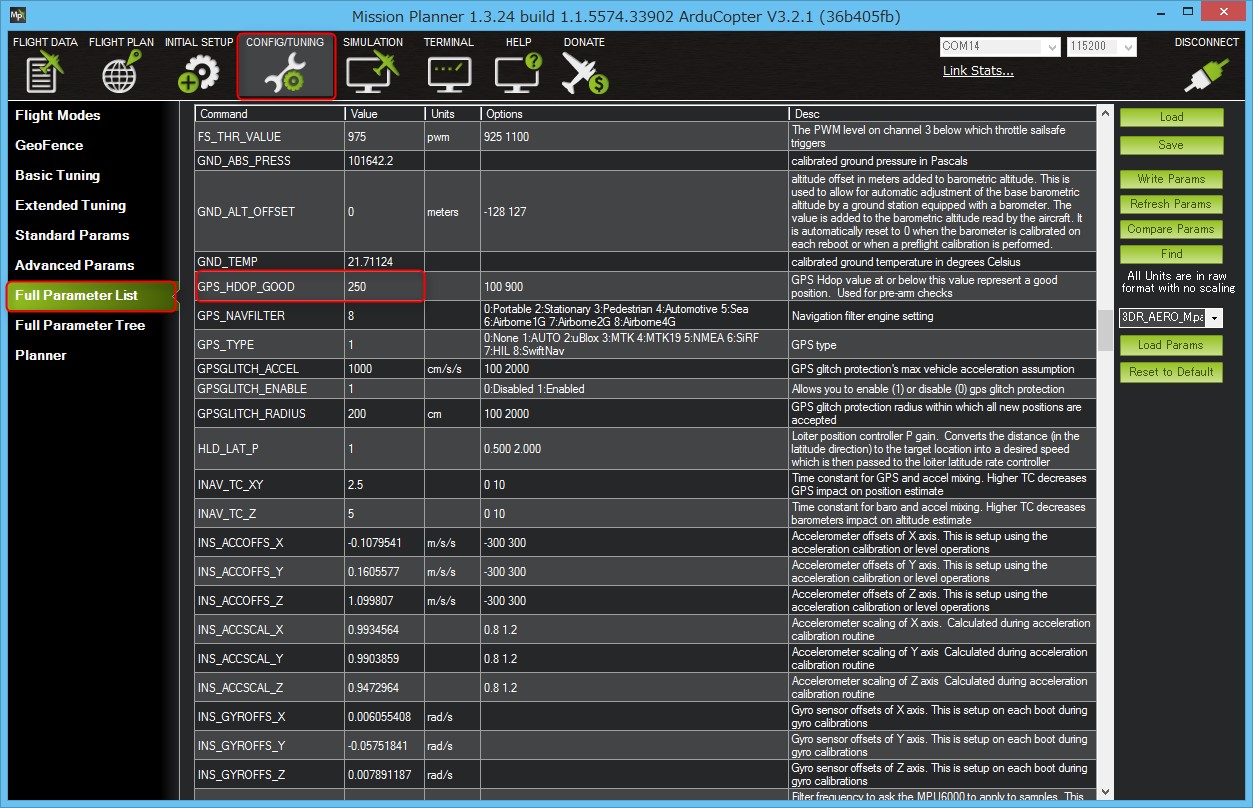
そのため、リミット値を2.5に上げました。(GPS_HDOP_GOOD parameter Valueを変更)
変更方法は、MissoonPlannerのメニューの中の以下の部分です。(実際に入力する値は250でして、これで2.5を意味するようです)
今回の記事は以上です、次は、RTLモードとAutoモードにトライです。
かたもとです
おかげさまで本日arducopterにコントローラを交換して初飛行しました。
最初モーターの回転が上がらず、浮上できませんでしたがEEPROMのクリアをして再度最初からやり直したら正常な回転をするようになりました。
いや~Multiwiiと比べるとすごく安定しています。ファントムと操縦フィーリングが同じような感じですねもう一機のMultiwii機をarducopterに変更しようかと思っています。
さて、教えていただきたいことがあります。
Stablize モードとAltHoldモードは正常に動いていますが、Loiterモードだけ定位置で止まらず、しかも姿勢も傾きあらぬ方向に飛んで行きスロットルも利かず風下に流れていきます。ニャーハンドさんがかかれた動作を期待していたのですが?
なにか設定を間違えているのでしょうか?GPSは8個以上拾っており、3DFixもしております。
simple modeやsuper simple modeにはチェックを入れておりません。PIDもデフォルトのままです。
3DrobotecのHPにあるloiterPIDは同じで、RateLoiterのIMAXが違いますが・・・?
http://copter.ardupilot.com/wiki/flying-arducopter/flight-modes/loiter-mode/
拡張LEDは今のところまだ光っておりません。コントローラが悪いのか、LEDが悪いのか切り分けてみたいと思います。
こんにちは、かたもとさん。コングラチュレーション!
まだ課題は残っているようですが、がとりあえずフライトできてよかったですね。
早速ですが、Loiterモードで飛行安定しない件ですが経験を踏まえてコメントします。
1)PID設定などは特になにも変えていませんです、初フライトの状態で全然問題なく安定飛行してたんで変えることなく現在に至ったというのが正直なところです。参考までに自機のPID設定値のスクリーンショットをYouTubeにアップしました。URLは(https://www.youtube.com/watch?v=2WPCg5ijTf0)
2)現在は取り外してしまってますがカニ足スキッド+Gimbal+GoPro搭載で重量増加してしまいフライトが不安定になったことがあります。記事は(http://www.umek.topaz.ne.jp/rcsky/2015/05/x525-arducopter-flight7/)重量増が約600gにもなりスロットル・スティックも3/4ほどまで上げないと離陸できないほどパワーが必要でした。そのせいか、姿勢制御できるパワーに余裕がなくなったのでとても不安定は飛行になりました。かたもとさんのフライトもなんとなくそんな状況のような気がしますので、一度試しに軽量化するかペラサイズアップをやってみるといいのではと思います。自機の軽量化は効果抜群でして、スロットル・スティックセンタでホバリングできるほどにパワーに余裕が出るようになりました。(すみませんが、ペラサイズアップは効果有とは思うのですが自機では未検証です。)
3)もう一つの不安定フライトは気圧センサーの太陽光による影響です。離陸直後はなにも問題なかったのですが数分後、突如上下動が激しく出てくるようになりました。実際離陸させないで直射日光の元においてMissionPLannerなどで見てみるとあっという間に高度がアップしていくのが見れました。対策は黒っぽいスポンジを気圧センサーの上にかぶせて日光が当たらないようにしました、ただし気圧センサーなので空気の通り道は確保しないといけないのでカッターでコの字型にスポンジを切ってます。対策後はこの問題には全然遭遇してません。
5)APM2.6のパラメータは一つだけ設定を変えました、GPS_HDOP_GOODというパラメータでしてこれをデフォルトの200から270に変えました。というのはGPS衛星捕捉数が8個ぐらいあってもHDOPが低くてARMできないことが何回かありフィールドで2時間ぐらい待ちになっあことがあり、HDOP値が2.7以下ならARMできるようにしました。
6)APM2.6内蔵のログデータで解析するというのも一手ですかね、実際に上記気圧センサーの誤動作問題はこのログである程度分かりました。
7)ExternalLEDの画像もついでにYouTube画像の中に入れておきましたので、ご参考に。
いろいろと教えていただきありがとうございます。
やっとarducopterのloiterできました。
別のコントローラー一式を交換したところloiterも綺麗に決まりました。
3~4mの風でしたが抜群の止まりです。
https://youtu.be/VMWzdOy_2Vk
画面が揺れているのは片手でビデオカメラで写し、もう一方の手で操縦していたためでした。
手にもジンバルが必要か?
結局これまで使っていたコントローラーは壊れていたようです。(T_T)
それにしてもloiter中の舵は利かないものですね。
次はRTL > missionflight >>>>と試してみます。
それにしてもarducopterはファントムと同じ動きをしますね?
やりましてたね、動画みましたよ、フライト安定してますね。MultiWiiのGPSモードはドリフトがでてフラフラするんですが、このArduCopterはXY座標だけでなく高度もピタッと止まってとても安定しますね、逆に豪快なフライトは苦手でアクロはMultiWiiのほうが楽しい感じですが、なにはともあれLoiterモードフライトできてよかったですね。このArduCopterとても奥が深くてこちらもまだまだできてない機能がたくさんありそうで全然飽きが来ませんです。今はFollowMeの距離をBluetooth以外の通信方法を使いなんとか延ばせないかと頑張っておりますが、この暑さのためめげております。またなにかあればコメントください。ではまた。
おかげさまで、ミッションフライトまでできました。
Multiwiiでは考えられない性能です。MultiwiiはVer2.2で飛ばしておりました。それよりも上のVerを試しましたが、設定が悪いのか不安定になり2.2で飛ばしておりました。
しかし。Multiwiiは高度が定まらないし、GPSHold(loiter)の動きが私の思いと反した動きをするのでいつも飛ばすのに苦労していました。現在のMultiwiiをarducopterに交換しようと思っています。(これまでMultiwiiで撮りました映像はyoutubeで”かたもと”で検索していただくと出てきます。飛行の苦労が出ています(>_<))
確かにbluetoothは短距離通信ですね。買い置きのXbeeがあるので、それを使ってみたいと思います。
また情報交換やら教授よろしくお願いいたします。