
Autoモードでのミッション・フライトを試して来ました。Loiterモード、RTLモードなどのGPSを利用した自律飛行がうまくいっていってるので、さほど心配なくトライできました。
近くの広場でのテストフライトということで、飛行ルートもコンパクトにして高度も10m前後ととてもイージーなルートのフライトです、結果は大成功です。
手順は大まかに以下の様になります。
- 事前に飛行ルートをGCS(注)にてプログラミング
- ArduCopterに飛行ルートをアップロード
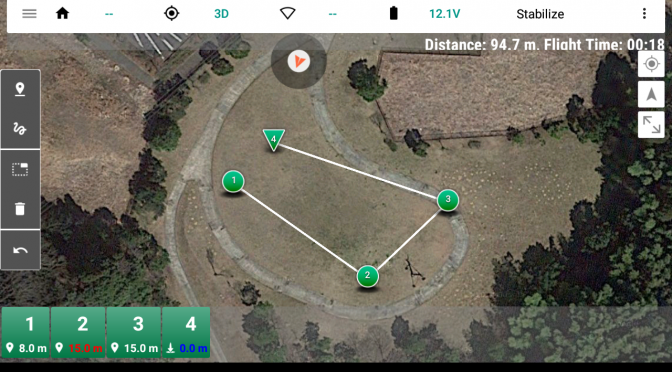
- フライトモードのAutoモード起動で飛行ルートに沿ってミッション・フライト実行
(注)GCSとはGroundControlStationsの略で、地上側で機体制御(情報取得・設定・操作など)を行う物で実際にはPCとかスマホ、タブレット上で動作するソフトウェアのことです。(ここに詳しく書かれてます)
自宅PC(Windows8.1)ではMissionPlanner、屋外ではNexus7(AndroidTablet)でTower(DroidPlanner3)を使ってます。
ArduCopterX525とNexus7間の通信はBT(Bluetooth)を使用してますが到達距離が数10m程度しかないのでフライト中に通信中断が何回も発生します。この通信は情報取得にしか使ってないのでフライトには全然影響はないのですが少々気になりますね。(将来的にはZigBeeに置き換えようと思ってます)
このGCSとArduCopterの組み合わせとても多彩でして、面白そうな機能が沢山あります、順次実験していきたいと思います。
以上