

Tarotジンバルを搭載したので早速、空撮フライトやってきました。MissionFlightでの空撮フライトもしてきたんですが、動画編集に手間取ってるので先にFollowMeモードのレポートをします。
FollowMeモードとは?
FollowMeモードとは、ArduCopterが操縦者を追跡していくというフライトモードのことを言ってまして仕組みはいたって単純でして、
- GPS搭載Android端末を使用
- 同端末のGPS座標を無線でArduCopter本体に送信
- ArduCopterは受信したGPS座標に向けてフライト
- FollowMe中はYawコントロールだけでなくジンバル・チルトコントロールも行われる
- 追跡中の高度、距離も設定可
という具合で実現してます。
実際のフライトの模様をTarotジンバル+GoPro3で動画に収めてみました。
実際の操作手順などを詳しくレポートしてみます。
Android端末&アプリ
ArduCopter対応の定番Androidアプリ「Tower」を使いました、他にもまだ使ったことないのですが「Andropilot」というアプリも対応している様です。
Android端末には①GPS搭載、②機体との通信用ワイアレス機能が必要です。(管理人はNexus7、第一世代2012年製を使用)
参考までにublox社からリリースのGPS評価ツールアプリ「u-center」はここからDL出来ます。このアプリでGPS性能が評価できるので試しに見てみるのも良いかもです。
操作手順
T10Jプロポ電源オン ⇒ ArduCopter電源オン ⇒ Tower起動&コネクトまでやると以下の画面になります。
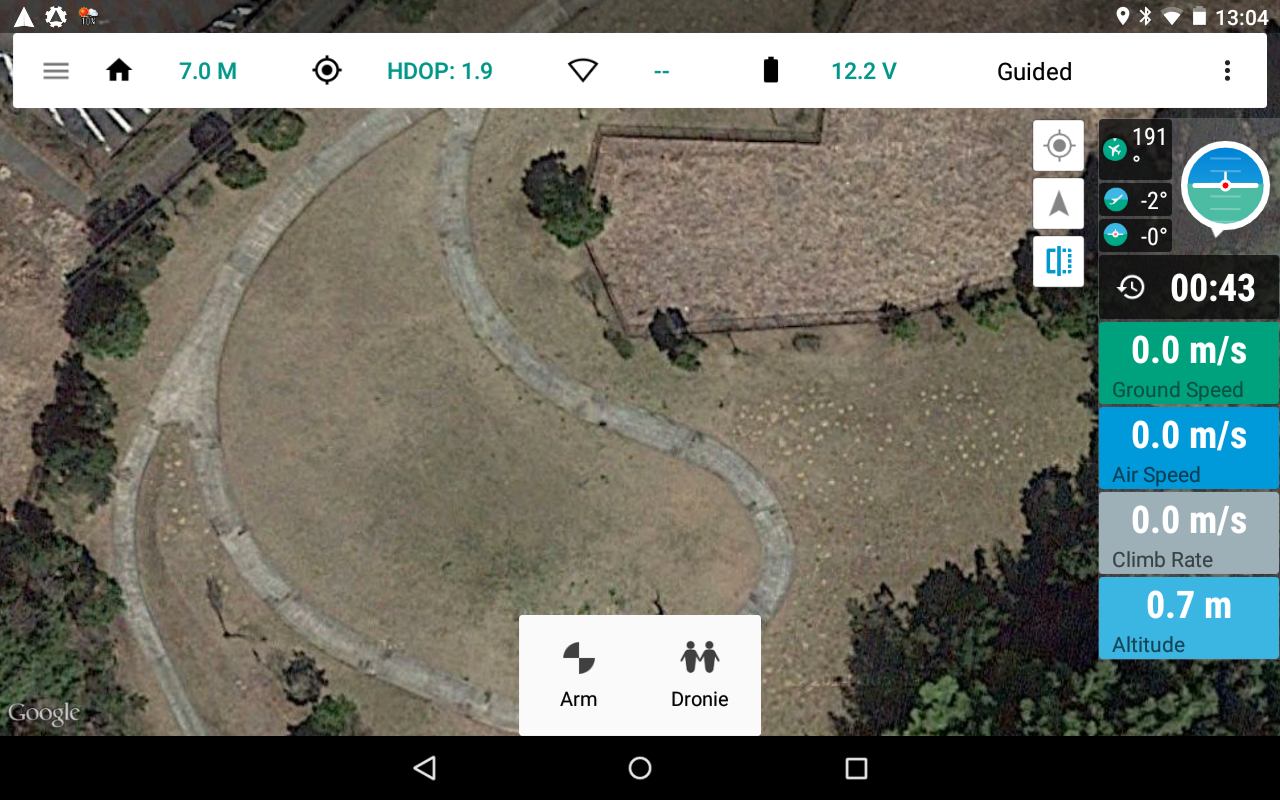 注)画面下の方に、Dronieというボタンが表示されてますが、Dronieボタンはクリックしないように、DronieとはDroneを使っての自撮画像撮影のことで、クリックして先に進むとDronie用のMissionPlanが自動作成され、更にUploadまでされてしまいます。知らないでこのままAutoモードに入れるとそのまま後方上空に飛んで行っていますので要注意です。(実は、管理人はそれをやってしまい小パニックになりました。)
注)画面下の方に、Dronieというボタンが表示されてますが、Dronieボタンはクリックしないように、DronieとはDroneを使っての自撮画像撮影のことで、クリックして先に進むとDronie用のMissionPlanが自動作成され、更にUploadまでされてしまいます。知らないでこのままAutoモードに入れるとそのまま後方上空に飛んで行っていますので要注意です。(実は、管理人はそれをやってしまい小パニックになりました。)
まずは離陸
離陸させ、適当な高度でまずはホバリング。以下の画面になります。
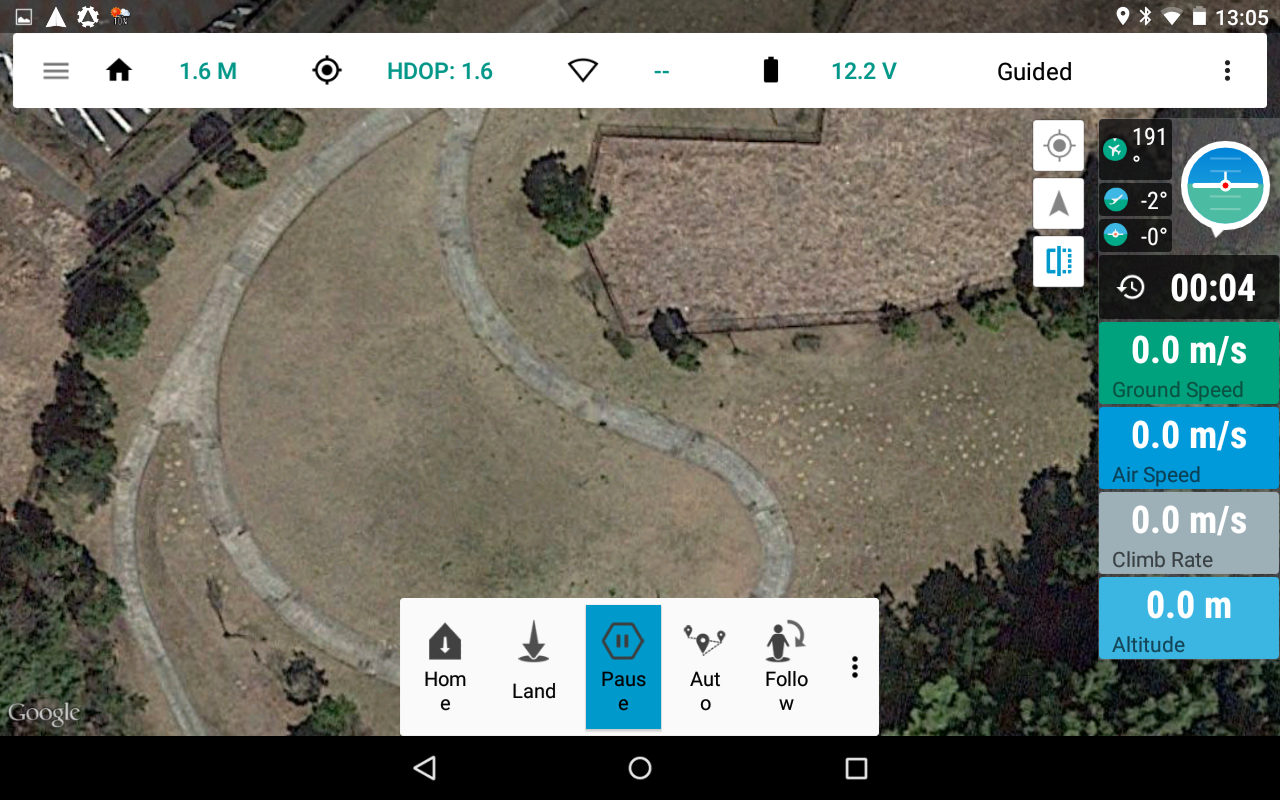 尚、プロポを使わなくてもタブレットだけでもArm⇒TakeOffまでできますが、だからと言ってプロポは不要と言うわけではありません。緊急回避の時には頼りになります。(ARM⇒離陸⇒ホバリングまではプロポ使用をおススメします)
尚、プロポを使わなくてもタブレットだけでもArm⇒TakeOffまでできますが、だからと言ってプロポは不要と言うわけではありません。緊急回避の時には頼りになります。(ARM⇒離陸⇒ホバリングまではプロポ使用をおススメします)
FollowMe起動
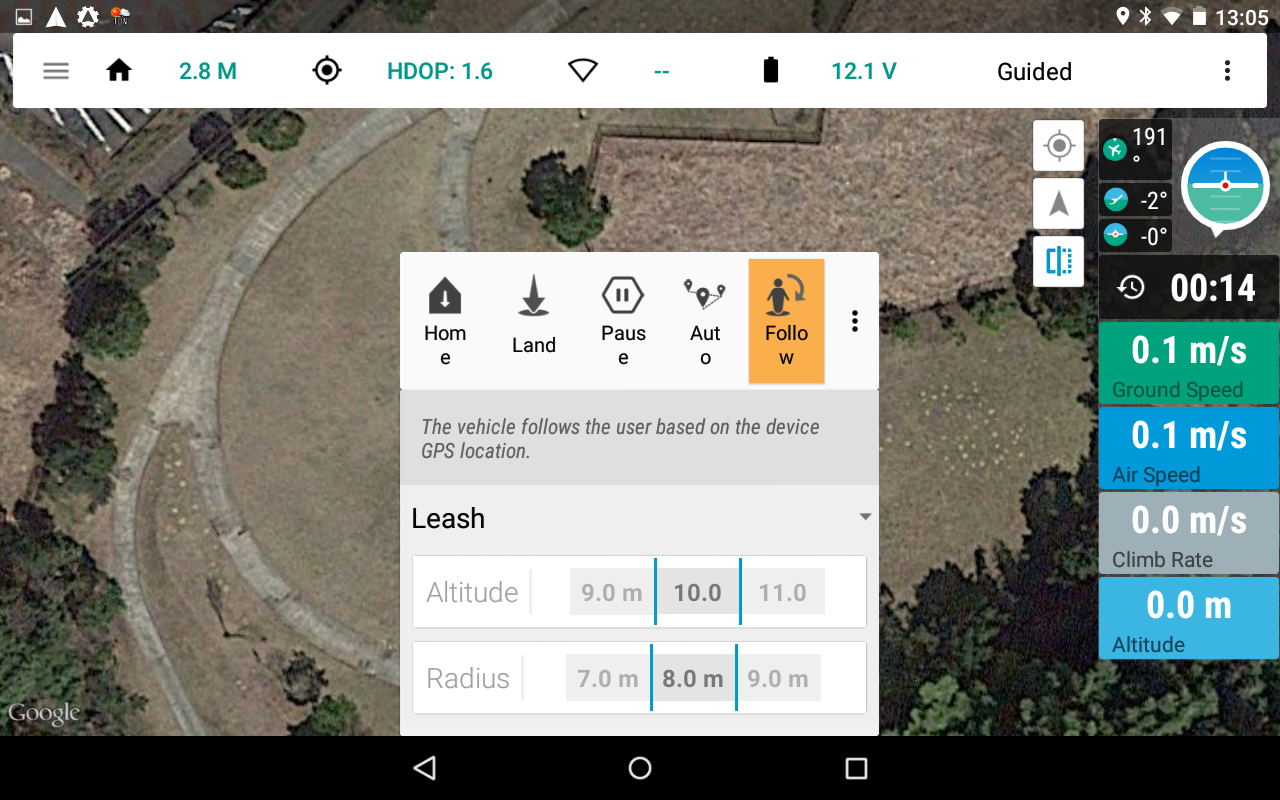
画面の下の方にFollowMeボタンがあるのでこれをクリックすると、高度と距離(機体とAndroid端末間)の設定画面が出てきますの適当に選択、あとは適当に移動すれば追跡してきます。(当然、Android端末を持ってですよ)
FollowMeモードにもいろんなモードがあります。
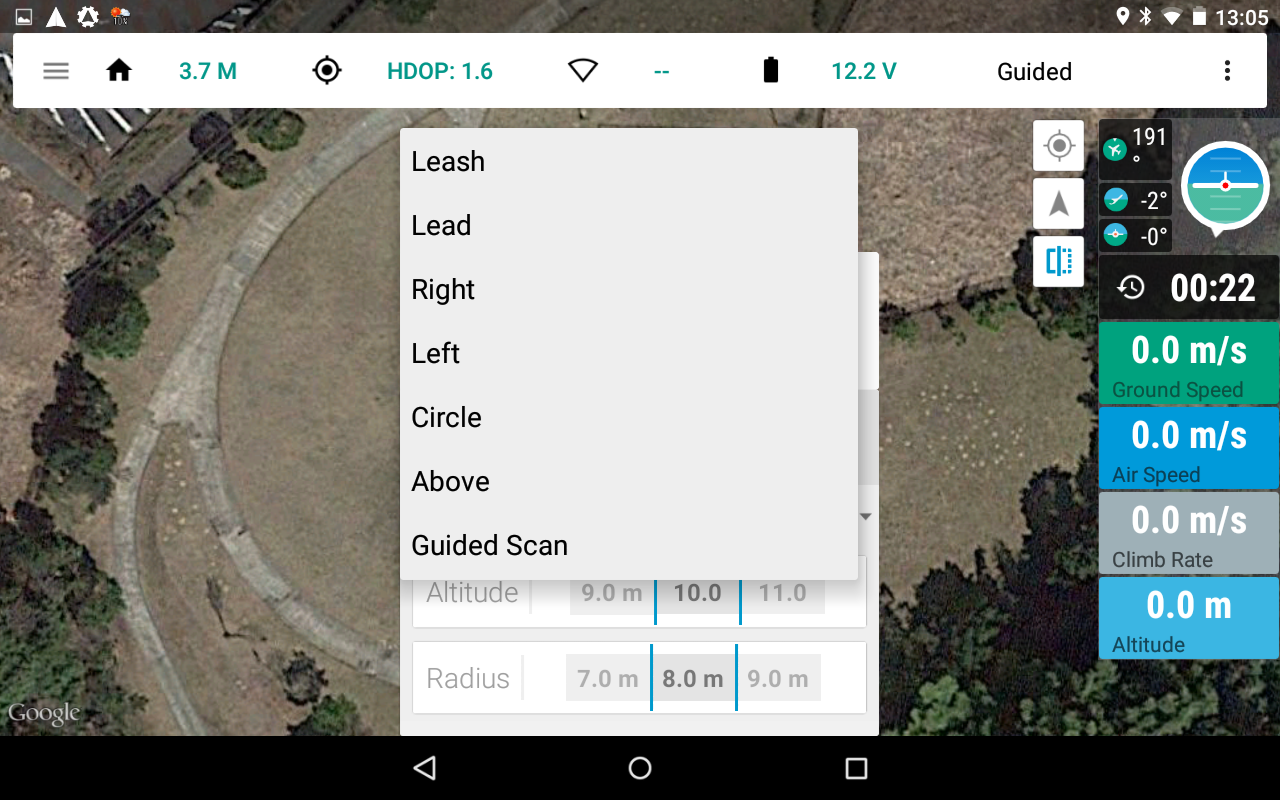 今回の追跡していくモードはLeashモードですが、他にもLeadモード(先行?)、Right、Left、Circle、Aboveなどがあります、一番下のGuidedScanモードとはどういうのでしょうね、今度試してみようと思います。
今回の追跡していくモードはLeashモードですが、他にもLeadモード(先行?)、Right、Left、Circle、Aboveなどがあります、一番下のGuidedScanモードとはどういうのでしょうね、今度試してみようと思います。
Leadなんかは偵察フライトなどにいいかもしれませんが、Leashと違い先行しているのでフライト方角はどうやって決めているのかがとても興味ありです。もしかしたらAndroid端末の向きを加速度センサーで検出して方角決めをしているのかもしれないとか思ったりしてます、いずれにしても試してみようかと思います。
試してみた感じでは
動作が緩慢で、ちょつと移動速度を速めると機体がオイテキボリになります。なのでターゲットは人で、歩行または小走りが追従の限界のような感じでした。Andorid 端末のGPS性能(位置精度、更新頻度)があまりよくないからのと、ワイヤレス通信がBTなので20~30m程度しか届かないというのが要因のような気がします。なので、
- GPSモジュール(uBloxのNeo-6M)を試しに使ってみる。(GPSデータ更新頻度も1Hzから5HzにUp)
- BTの代わりにZigBeeを使ってみる。(1kmぐらいは届きそう)
というのが次の製作アイテムです。(なかなか、興味が尽きなくてとても面白いですな)
以上