
nyan#2 のすべての投稿

X525 ArduCopter :組立編#15 ~T-Shape Skidに換装~
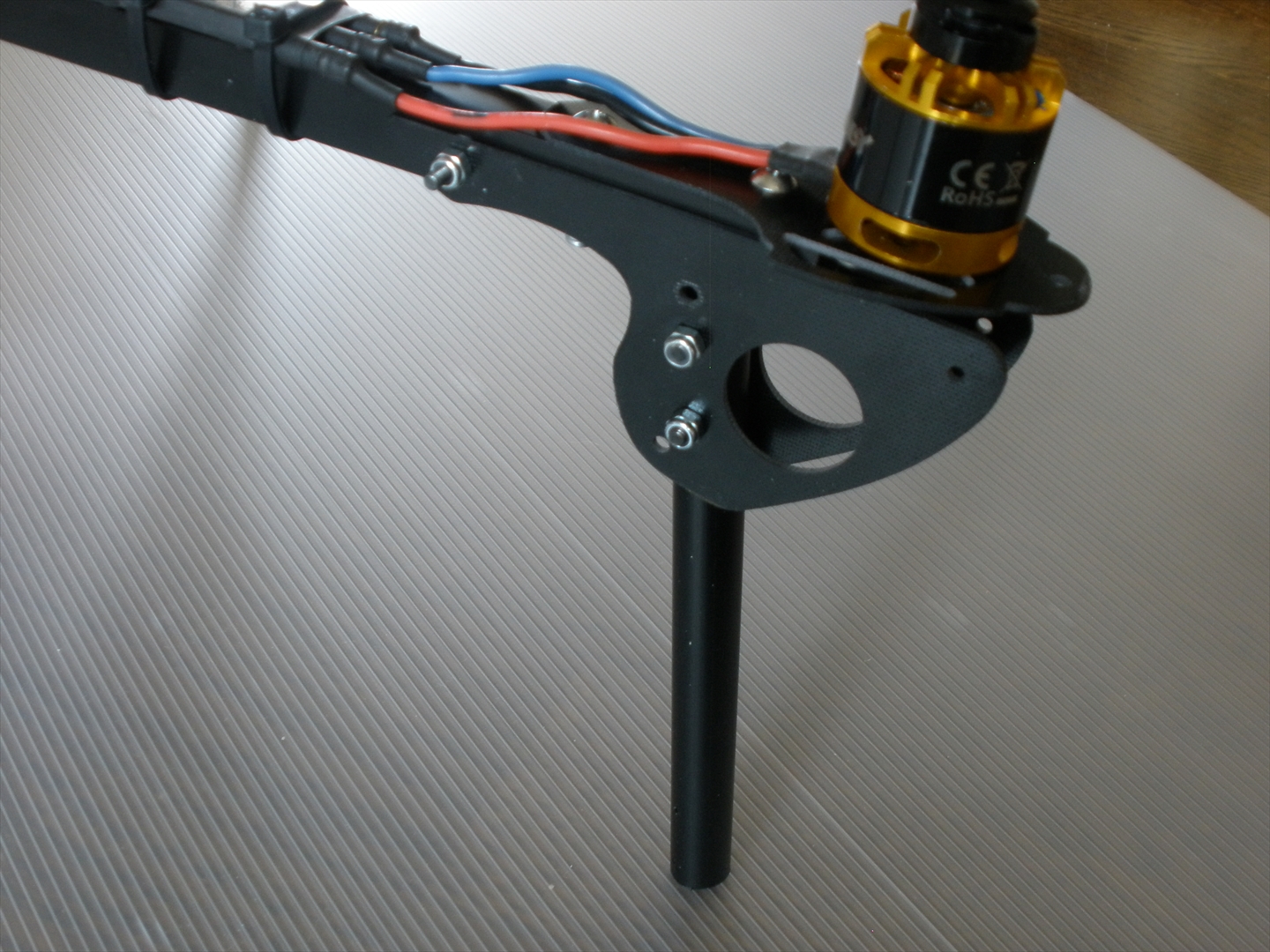
フライト中に、不注意にもLoiterモードからStablizeモードに変えてしまい高度5mぐらいから急降下、地面に激突してしまいSkid破損、以前から使ってみたかったT-ShapeSKid($18.03)をGLBで購入し換装しました。
重量増に対応するために同時に換装、
- ペラサイズ・アップ:9×4.7 ⇒ 10×4.5
- リポバッテリー容量アップ:2200mAh/3S ⇒ 3600mAh/3S
全装備状態:1425g ⇒ 1660g (注)GoPro+Gimbal+Lipo全搭載
X525 ArduCopter :組立編#14 ~FrSky Delta-8アンテナ線交換 ~
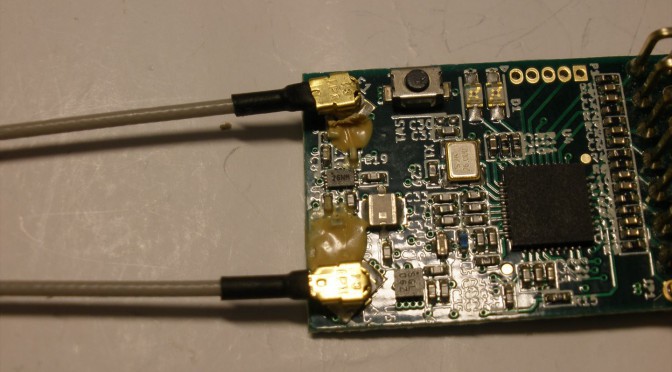
CPPM出力ができるということからX525にはFrSkyのDelta-8を搭載してましたが、先日アンテナ線の片方が切れているのたまたま発見、この状態で受信感度がどれだけ低下するのかを測定はしてないのですが、「もしかしたら制御不能になるかもしれない」と気にしながらのフライトは精神衛生上よくないので交換することに。
X525 ArduCopter :組立編#13 ~TelemetryにTWE-Liteを使う実験:①製作編~
APM2.6のTelemetry通信には現在BT(Bluetooth)を使ってます、なので通信距離は数十m位しかありません。
機体操作にはプロポ(FutabaT10J)を使ってるので、BT通信切れしても操縦不能になり墜落とか行方不明になるわけではなく、機体からのセンサー情報などが読み取れなくなるだけですが、とても気にはなります。
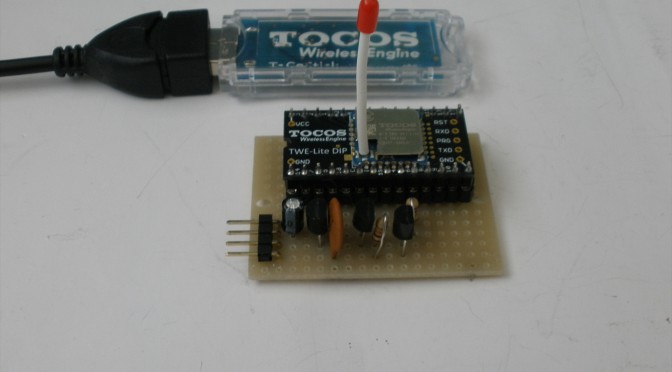
ということで、このBTをTWE-Lite(ZigBee派生)に置き換えてTelemetry通信距離を延ばそうと製作を始めました。
- 機体側:TWE-Lite DIPを使用(1500円@aitendo)
- 地上側:ToCoStickを使用(2760円@aitendo)
APMサイトではXBeeを推奨してますが、価格が安いのでこちらを使いました。シリアル通信に透過モードがあるのでAPM2.6、GCS共に修正不要でそのまま使えてます。
今回は、これを使った製作編の記事です。
続きを読む X525 ArduCopter :組立編#13 ~TelemetryにTWE-Liteを使う実験:①製作編~

X525 ArduCopter :フライト編#8 ~Dronie(ドローン自撮り)を試しにやってみました~

X525 ArduCopter :組立編#12 ~Gimbal位置を前方に移動しペラ映り込み回避~
コンパクト化ということでカニ足スキッドを撤去した時にジンバル位置をセンター近くに持ってきました。
ある程度予想はしてたんですが、いざ空撮してみると、スキッドとペラがしっかりと写りこんでました。
ということで、またまた機体改造に着手しました、と言ってもジンバルを前方に移動して画角範囲に写りこまないようにしただけですが。
移動前後が比較できるように2画面になるよう編集しました。

X525 ArduCopter :組立編#11 ~スキッドを外して255gの軽量化~
とりあえずGimbal+GoProを取り付けて空撮には成功したものの、機体の重量増による操縦性悪化がとても気になって、軽量化にトライしました。
軽量化のポイントはスキッド改造です。
- M-200 LandingSkidを撤去
- 代わりのスキッドを自作
カニ足スキッドは320gもあるので即撤去、これに変わるスキッドもどきをホームセンターで買った12㎜φのプラ・パイプ(ABS?)を加工して高さを稼ぎました。
この結果、全重量1665g ⇒ 1410gと255gの軽量化に成功です。

X525 ArduCopter :フライト編#7 ~Tarot T-2D Gimbal、MissionFlightを空撮してみました~
Tarot T-2D Gimbal+GoProHero3+搭載での初空撮のテストフライトをやってきました。当日はMissionFlightとFollwoMeの二つのモードを試してきました。
MissionFlightは前回記事では地上撮でのレポートでしたが、今回はMissionFlightを空撮でやってみました。
空撮画像を見てみるとYAW軸に少しフラフラが出てますね、それ以外に大きな不安定さは画像には出てないのですが、しかしながら手動操縦した感じでは重量オーバー(スキッド+ジンバル+GoPro搭載で、1050g⇒1645g)による影響はハッキリと感じました、
操縦した感じでは
- スロットル・ステック位置を3/4ほど上げないと離陸できない(スキッド未搭載時はセンター位置ちょい下あたりで離陸できた)
- ラダーを入れると降下する。(揚力が低下するのでしょうかヨー軸回転と共に、かなり高度ダウンします。)
- エルロン、エレベータ・スティック操作時もフラフラと不安定になる。
といった感じでした、この状態ではちょっと不安が残るのでやはり軽量化は必須と思いました。
他にも、プロペラサイズ・アップ+モーターパワーアップで推力を上げるという手も考えられますが、まずは贅肉そぎ落としから始めるつもりです。

X525 ArduCopter :フライト編#6 ~FollowMeを試す~
Tarotジンバルを搭載したので早速、空撮フライトやってきました。MissionFlightでの空撮フライトもしてきたんですが、動画編集に手間取ってるので先にFollowMeモードのレポートをします。
FollowMeモードとは?
FollowMeモードとは、ArduCopterが操縦者を追跡していくというフライトモードのことを言ってまして仕組みはいたって単純でして、
- GPS搭載Android端末を使用
- 同端末のGPS座標を無線でArduCopter本体に送信
- ArduCopterは受信したGPS座標に向けてフライト
- FollowMe中はYawコントロールだけでなくジンバル・チルトコントロールも行われる
- 追跡中の高度、距離も設定可
という具合で実現してます。
実際のフライトの模様をTarotジンバル+GoPro3で動画に収めてみました。

X525 ArduCopter :組立編#10 ~Tarot T-2D Gimbal搭載までやっと出来ました~
スキッドの軽量&コンパクト化が済んでからとも思ったんですが空撮画像を見たくてジンバルを搭載しました。
搭載したのはTarot T-2D、Brushless 2軸Gimbalでして半年ほど前にInfinityHobby(台湾)で$99とディスカウントしてたので即買いしたヤツです。購入後に知ったのですが、APMサイトでもコスパが良いと推奨してました。
取付から動作確認完了までの今回の手順です。
- スキッドへのジンバル取り付け&配線
- ジンバル・コントローラのファームバージョン更新&設定
- MissionPlanner設定
続きを読む X525 ArduCopter :組立編#10 ~Tarot T-2D Gimbal搭載までやっと出来ました~