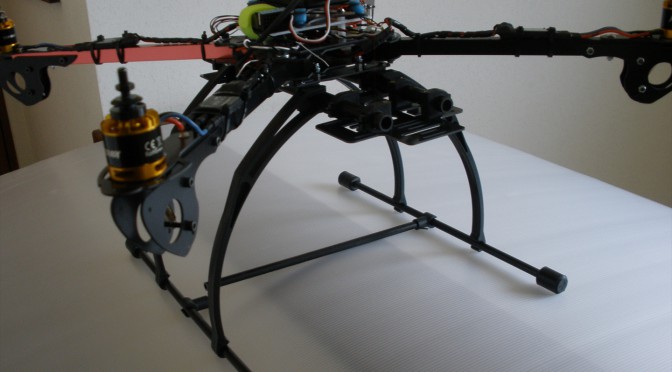
X525 ArduCopterのフライトにもかなり習熟してきたんで、そろそろ空撮始めようかと思いスキッドを取り付けてみました。
とはいえ、実のところ手持ちのCMOSカメラ(WingCam)で空撮は既に何回かやってみたんですが予想通りのコンニャク現象と冴えない画像でとてもアップする気にもなりませんでした、やはり空撮はGoPro3 + Gimbalでキチンと取付しないとダメなようです。
空撮用にと、TarotのT-2D Gimbal(2014/12、InfinityHobby購入、$99.00)とLandingSkid(2015/3、GLB購入、$28.20)は既に入手済みでしたが両方とも汎用品なので、また取付に際し四苦八苦するのが少々面倒ということもあり手付かず状態でした。
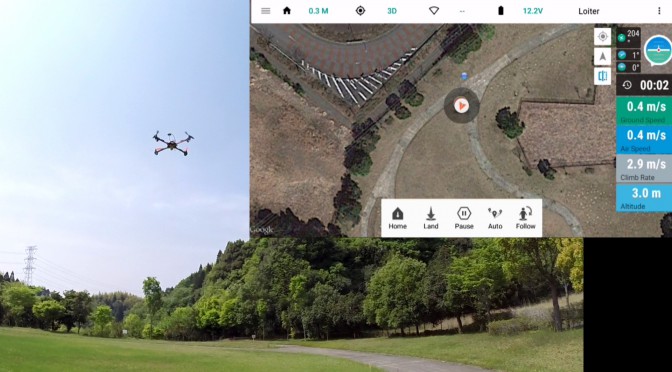
ArduCopterにはFollowMe、LookAtMe、Dronieなどの興味深い機能があるのですが、Gimbalが無いと楽しめないようなので一念発起してSKIDの組立&取付をはじめました。
組み立ててみると、結構大きいのと、重量があるので余り感心しません。重量配分は測定値で
- 機体本体(リポ込)=
1,050g⇒ 1,075g - スキッド(単体)= 325g
- Tarot T-2DGimbal= 190g
- GoPro= 80g
総重量= 1,645g ⇒ 1,670g
う~ん、重いですなぁ、軽量化を考えないと・・・・、コンパクト化も考えないと運搬に苦労しそうです。(バイクでの移動が主となるので)