以前から気になってたDronieを試しにやってみました。
Dronieとは「ドローンを使っての自撮り」のことを意味しててスマホとかでの自撮りのSelfieをもじってできた言葉のようです。
3DR社のサイトに詳しく書いてありますが、中身は英語なので面倒な人はYouTubeのサンプル画像を見れば何のことかよくわかりますよ。

コンパクト化ということでカニ足スキッドを撤去した時にジンバル位置をセンター近くに持ってきました。
ある程度予想はしてたんですが、いざ空撮してみると、スキッドとペラがしっかりと写りこんでました。
ということで、またまた機体改造に着手しました、と言ってもジンバルを前方に移動して画角範囲に写りこまないようにしただけですが。
移動前後が比較できるように2画面になるよう編集しました。
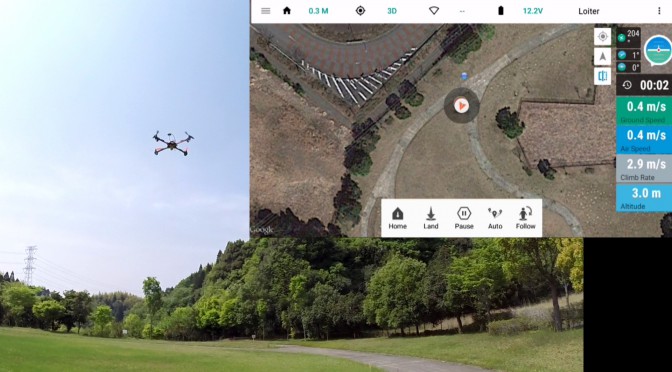
Tarot T-2D Gimbal+GoProHero3+搭載での初空撮のテストフライトをやってきました。当日はMissionFlightとFollwoMeの二つのモードを試してきました。
MissionFlightは前回記事では地上撮でのレポートでしたが、今回はMissionFlightを空撮でやってみました。
空撮画像を見てみるとYAW軸に少しフラフラが出てますね、それ以外に大きな不安定さは画像には出てないのですが、しかしながら手動操縦した感じでは重量オーバー(スキッド+ジンバル+GoPro搭載で、1050g⇒1645g)による影響はハッキリと感じました、
といった感じでした、この状態ではちょっと不安が残るのでやはり軽量化は必須と思いました。
他にも、プロペラサイズ・アップ+モーターパワーアップで推力を上げるという手も考えられますが、まずは贅肉そぎ落としから始めるつもりです。
MissionFlight失敗編というタイトルですがArduCopter自身がMissionFlight に失敗してコースアウトしたという訳ではなくてルートの設定ミスをやっちゃって「木に激突」という結果を招きました。
Missionのルート決めはAndroidタブレット上でGoogleMapを見ながら希望のWayPointをタッチしていきますが、この時Map上では高さのある物体(建物、木など)は判別がほとんど不可能です。
今回のMissionFlightではWayPoint5の地点に丁度、高さ10~15m程度の立木がありこれに気付かずに設定してしまいました。
MissionFlightそのものは正確にWayPointをトレースしていったので最後に木に激突でジ・エンドということになりました。
動画の最後の方にも教訓としてコメントしましたが。
教訓:
①WayPoint設定には注意しましょう。
*GoogleMap画面だけでなく実際の場所をよく観察すること。
②MissionFlight中断の操作方法を練習しておきましょう。
*Stickは無効になってるので、まずはLoiterモードに戻すこと、
但し、スロットル・スティックはセンターにしておかないと
意図しない上昇・下降に見舞われ。更にパニクります。
以上、皆さんも気を付けてください。
突然の急降下対策以降は安定したフライトが続きRTLモード、Autoモードも安心してトライできるようになりましたが今回はRTLモードの割と判り易い動画が撮れたのでレポートしようと思います。
ご存知の様に、このRTLモードとはLaunchポジションへ強制帰還させるモードでして、はるか遠方に行ってしまった機体を無事に戻す時など非常に有用な機能です、Phantom2、MultiWiiにももちろん搭載されています。
マルチコプターは飛行機と違い対称形しているため距離が離れた時には姿勢確認がとても難しく、プロポ操作しても近寄るどころかどんどん離れて行きひやっとしたことが何度もありましたが、この機能のお陰で機体ロストから回避できたことが何度もあります。
RTLモードでのテストフライトを動画に収めておきました、興味のある方は一度見てみてください。
「続きを読む」の方に情報整理を兼ねて詳細にメモリました。
続きを読む X525 ArduCopter :フライト編#3 ~RTL(ReturnToLaunch)モードをレポート~
初フライトでLoiterモードまで順調にいったので、その後もフライト練習に通ってましたが、ある日RTLモードの確認中に突然の急降下⇒地上接触に遭遇しました。
墜落では無かったので機体損傷は無かったのが幸いでしたがちょっと焦りました。機体崩壊しないうちに引き揚げた方がよさそうな気がしたのでこの日はリポを全部(4本)使い切らないままフィールドから撤収しました。
帰宅後のフライト・ログのデータ解析の結果、Baroの外光遮蔽が不充分と推定しスポンジカバー追加の対策をしました。原因の特定化は明確にできてませんが、対策後のフライト(10回以上)では突然の急降下現象は発生してないので対策の効果ありと思ってます。
「続きを読む・・・」に詳細をメモリました。
久しぶりにPhantom2のフライトをしてきました。さすがにこの機体は安定してますね、空撮に専念できます。桜の開花状況と天気が晴れていて、更にかぜが無い時という条件が揃うのは中々無いものですね。うまい具合に撮れました。バッテリー3本ほどフライトしてきました、(トータル20分ぐらい)
今日、2回目のV2.4テストフライトをしてきました。今回のファームバージョンではAP_MODEが使えなくなったのでプロポのプログラムミキシングを設定してのトライです。
このプログラムミキシングは一応効果ありでまずまずでした、しかしGPS HOMEの機体制御方法の変更(一度高度15mに上昇⇒HOMEポジションへの移動)に戸惑い、一時下降できなくなりパニック寸前状態に陥りました。いずれにしてもV2.3と比較して操縦が難くて思うように飛んでくれません。
とりあえずV2.3に戻して当初考えてたように本機HJ450は操縦訓練用とすることにして、GPSナビフライト(Missionフライト)はArduCopterで進めようと思います。
続きを読む HJ450 MultiWii QuadCopter:フライト編#9 ~AIOP+V2.4でテストフライト(2回目)~