コンパクト化ということでカニ足スキッドを撤去した時にジンバル位置をセンター近くに持ってきました。
ある程度予想はしてたんですが、いざ空撮してみると、スキッドとペラがしっかりと写りこんでました。
ということで、またまた機体改造に着手しました、と言ってもジンバルを前方に移動して画角範囲に写りこまないようにしただけですが。
移動前後が比較できるように2画面になるよう編集しました。

コンパクト化ということでカニ足スキッドを撤去した時にジンバル位置をセンター近くに持ってきました。
ある程度予想はしてたんですが、いざ空撮してみると、スキッドとペラがしっかりと写りこんでました。
ということで、またまた機体改造に着手しました、と言ってもジンバルを前方に移動して画角範囲に写りこまないようにしただけですが。
移動前後が比較できるように2画面になるよう編集しました。
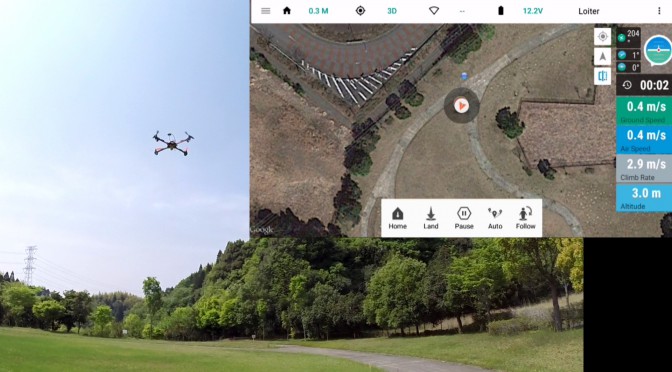
突然の急降下対策以降は安定したフライトが続きRTLモード、Autoモードも安心してトライできるようになりましたが今回はRTLモードの割と判り易い動画が撮れたのでレポートしようと思います。
ご存知の様に、このRTLモードとはLaunchポジションへ強制帰還させるモードでして、はるか遠方に行ってしまった機体を無事に戻す時など非常に有用な機能です、Phantom2、MultiWiiにももちろん搭載されています。
マルチコプターは飛行機と違い対称形しているため距離が離れた時には姿勢確認がとても難しく、プロポ操作しても近寄るどころかどんどん離れて行きひやっとしたことが何度もありましたが、この機能のお陰で機体ロストから回避できたことが何度もあります。
RTLモードでのテストフライトを動画に収めておきました、興味のある方は一度見てみてください。
「続きを読む」の方に情報整理を兼ねて詳細にメモリました。
続きを読む X525 ArduCopter :フライト編#3 ~RTL(ReturnToLaunch)モードをレポート~
今日、2回目のV2.4テストフライトをしてきました。今回のファームバージョンではAP_MODEが使えなくなったのでプロポのプログラムミキシングを設定してのトライです。
このプログラムミキシングは一応効果ありでまずまずでした、しかしGPS HOMEの機体制御方法の変更(一度高度15mに上昇⇒HOMEポジションへの移動)に戸惑い、一時下降できなくなりパニック寸前状態に陥りました。いずれにしてもV2.3と比較して操縦が難くて思うように飛んでくれません。
とりあえずV2.3に戻して当初考えてたように本機HJ450は操縦訓練用とすることにして、GPSナビフライト(Missionフライト)はArduCopterで進めようと思います。
続きを読む HJ450 MultiWii QuadCopter:フライト編#9 ~AIOP+V2.4でテストフライト(2回目)~