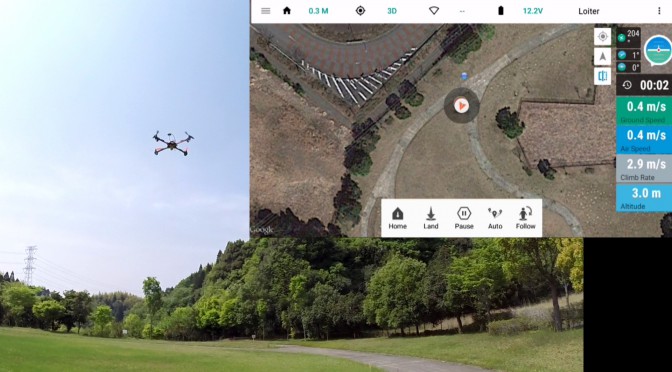
Tarot T-2D Gimbal+GoProHero3+搭載での初空撮のテストフライトをやってきました。当日はMissionFlightとFollwoMeの二つのモードを試してきました。
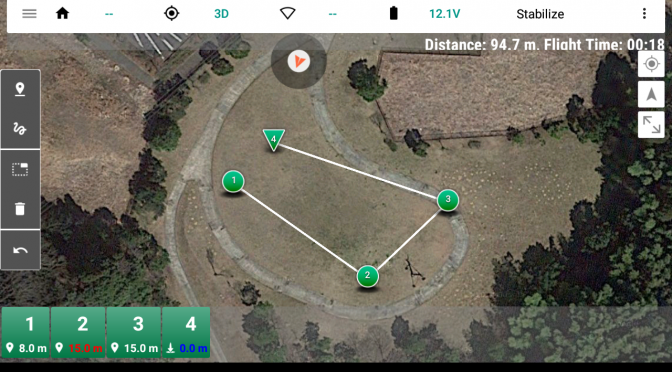
MissionFlightは前回記事では地上撮でのレポートでしたが、今回はMissionFlightを空撮でやってみました。
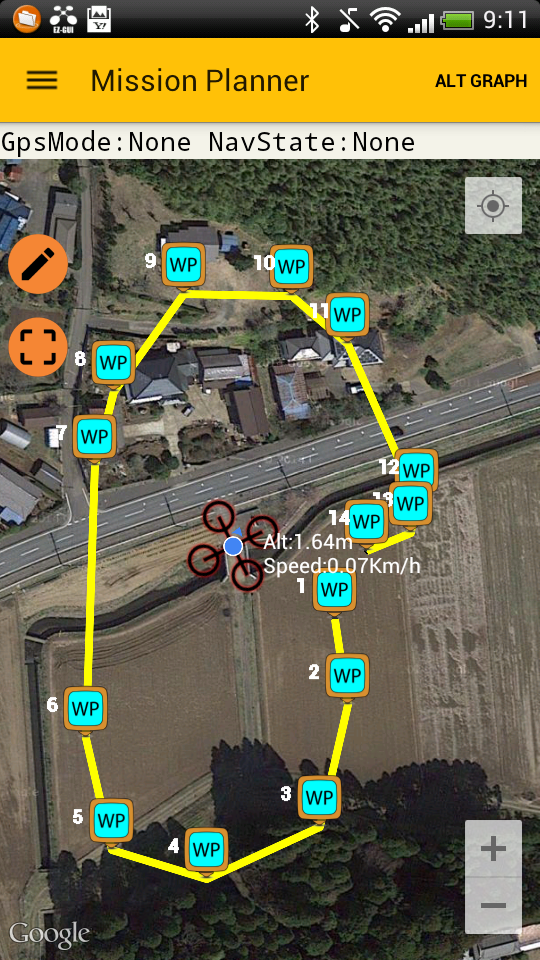
空撮画像を見てみるとYAW軸に少しフラフラが出てますね、それ以外に大きな不安定さは画像には出てないのですが、しかしながら手動操縦した感じでは重量オーバー(スキッド+ジンバル+GoPro搭載で、1050g⇒1645g)による影響はハッキリと感じました、
操縦した感じでは
- スロットル・ステック位置を3/4ほど上げないと離陸できない(スキッド未搭載時はセンター位置ちょい下あたりで離陸できた)
- ラダーを入れると降下する。(揚力が低下するのでしょうかヨー軸回転と共に、かなり高度ダウンします。)
- エルロン、エレベータ・スティック操作時もフラフラと不安定になる。
といった感じでした、この状態ではちょっと不安が残るのでやはり軽量化は必須と思いました。
他にも、プロペラサイズ・アップ+モーターパワーアップで推力を上げるという手も考えられますが、まずは贅肉そぎ落としから始めるつもりです。



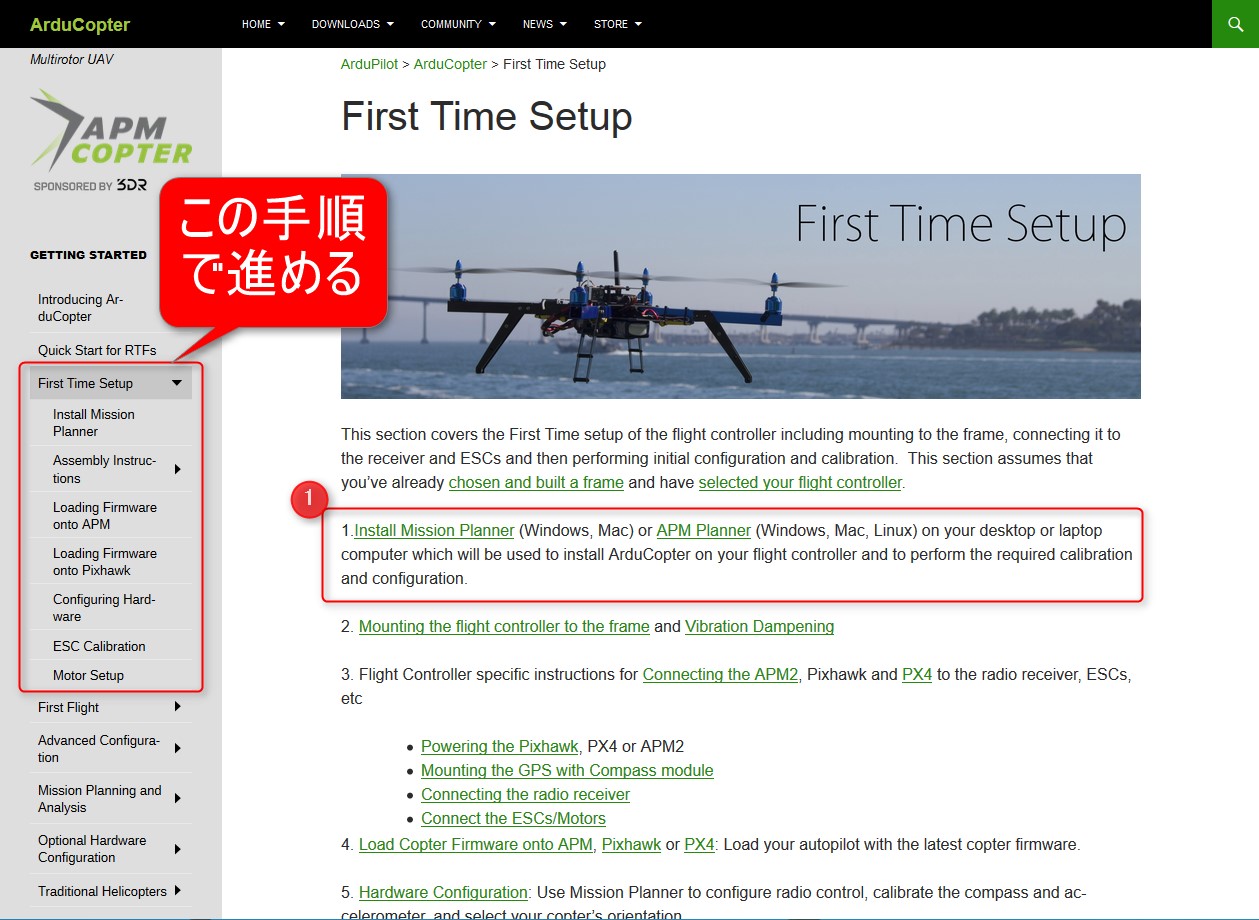
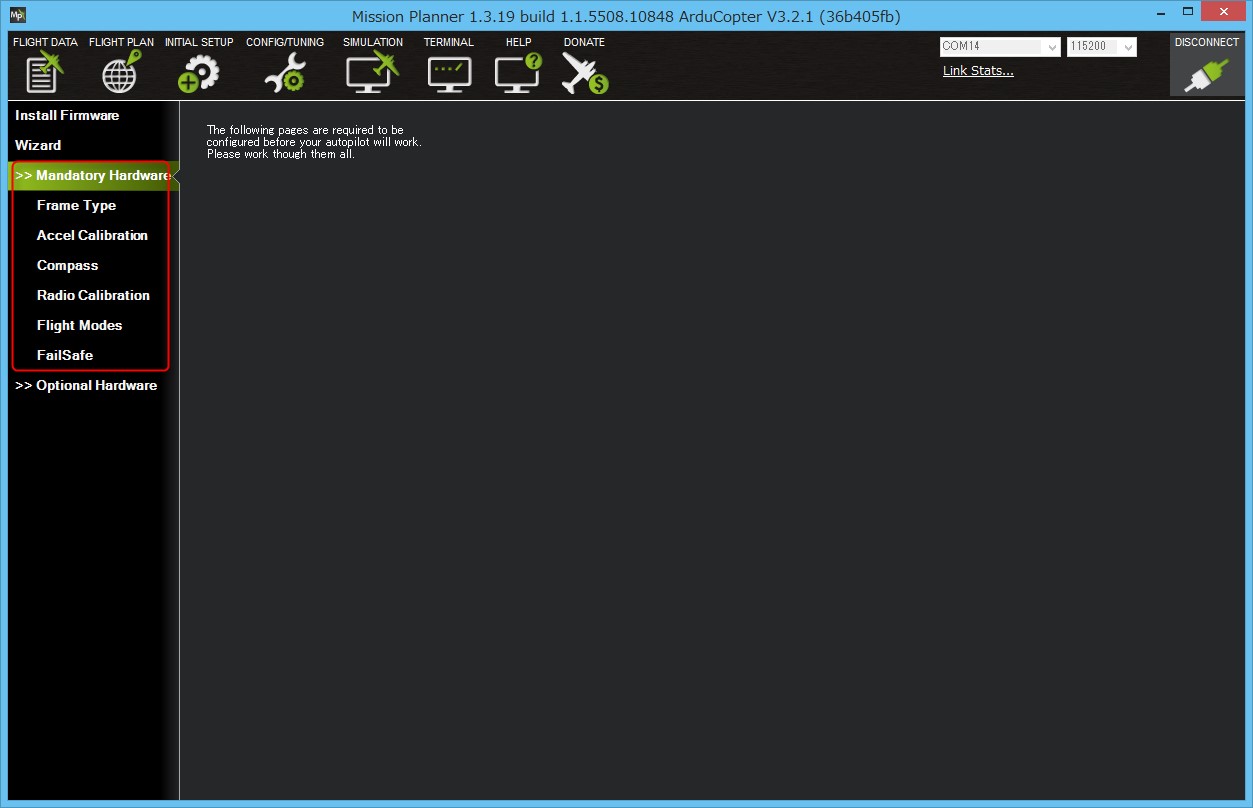
![X525 ArduCopter :組立編#6 ~MissisonPlanner[初期設定:その2]~MandatoryHardwareConfiguration~](https://umek.topaz.ne.jp/rcsky/wp-content/uploads/2015/03/2015-03-12_17h06_58-672x372.jpg)
![X525 ArduCopter :組立編#5 ~MissisonPlanner[初期設定:その1]ファーム更新~](https://umek.topaz.ne.jp/rcsky/wp-content/uploads/2015/03/2015-03-12_12h38_08e-672x372-1426138047.jpg)