
CPPM出力ができるということからX525にはFrSkyのDelta-8を搭載してましたが、先日アンテナ線の片方が切れているのたまたま発見、この状態で受信感度がどれだけ低下するのかを測定はしてないのですが、「もしかしたら制御不能になるかもしれない」と気にしながらのフライトは精神衛生上よくないので交換することに。
「メンテ&改造」カテゴリーアーカイブ
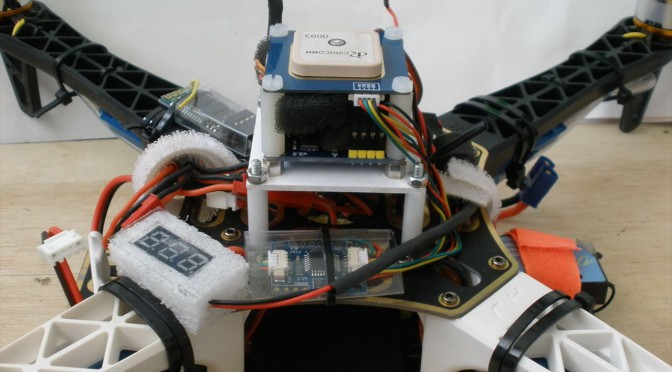
X525 ArduCopter :組立編#13 ~TelemetryにTWE-Liteを使う実験:①製作編~
APM2.6のTelemetry通信には現在BT(Bluetooth)を使ってます、なので通信距離は数十m位しかありません。
機体操作にはプロポ(FutabaT10J)を使ってるので、BT通信切れしても操縦不能になり墜落とか行方不明になるわけではなく、機体からのセンサー情報などが読み取れなくなるだけですが、とても気にはなります。
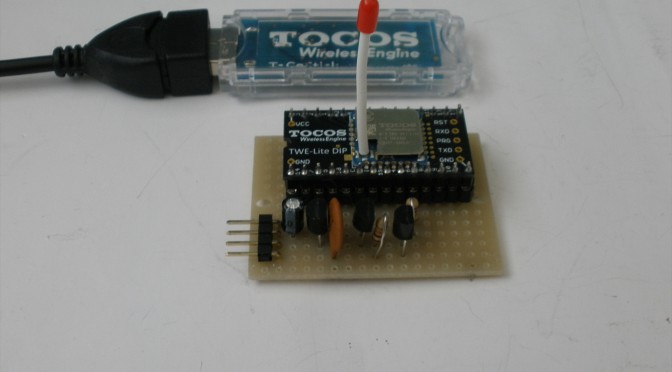
ということで、このBTをTWE-Lite(ZigBee派生)に置き換えてTelemetry通信距離を延ばそうと製作を始めました。
- 機体側:TWE-Lite DIPを使用(1500円@aitendo)
- 地上側:ToCoStickを使用(2760円@aitendo)
APMサイトではXBeeを推奨してますが、価格が安いのでこちらを使いました。シリアル通信に透過モードがあるのでAPM2.6、GCS共に修正不要でそのまま使えてます。
今回は、これを使った製作編の記事です。
続きを読む X525 ArduCopter :組立編#13 ~TelemetryにTWE-Liteを使う実験:①製作編~
X525 ArduCopter :組立編#9 ~スキッドを取付てはみたものの!?~
X525 ArduCopterのフライトにもかなり習熟してきたんで、そろそろ空撮始めようかと思いスキッドを取り付けてみました。
とはいえ、実のところ手持ちのCMOSカメラ(WingCam)で空撮は既に何回かやってみたんですが予想通りのコンニャク現象と冴えない画像でとてもアップする気にもなりませんでした、やはり空撮はGoPro3 + Gimbalでキチンと取付しないとダメなようです。
空撮用にと、TarotのT-2D Gimbal(2014/12、InfinityHobby購入、$99.00)とLandingSkid(2015/3、GLB購入、$28.20)は既に入手済みでしたが両方とも汎用品なので、また取付に際し四苦八苦するのが少々面倒ということもあり手付かず状態でした。
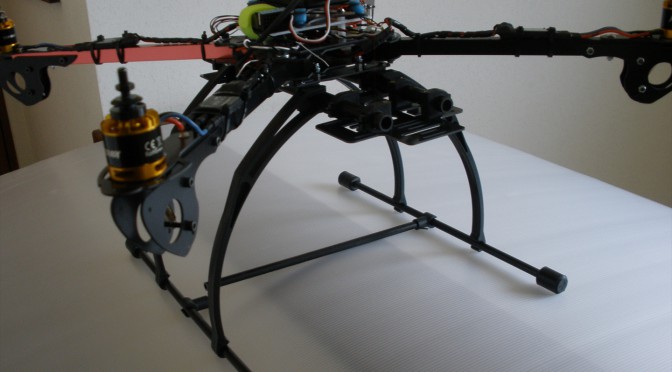
ArduCopterにはFollowMe、LookAtMe、Dronieなどの興味深い機能があるのですが、Gimbalが無いと楽しめないようなので一念発起してSKIDの組立&取付をはじめました。
組み立ててみると、結構大きいのと、重量があるので余り感心しません。重量配分は測定値で
- 機体本体(リポ込)=
1,050g⇒ 1,075g - スキッド(単体)= 325g
- Tarot T-2DGimbal= 190g
- GoPro= 80g
総重量= 1,645g ⇒ 1,670g
う~ん、重いですなぁ、軽量化を考えないと・・・・、コンパクト化も考えないと運搬に苦労しそうです。(バイクでの移動が主となるので)

X525 ArduCopter :組立編#4 ~GPSモジュールを分解してMagセンサーを覗いてみた~
MissionPlanner経由でMagセンサー(磁気コンパス)のキャリブレーションをやったのですが機体の向いてる方角と実際の方角が微妙にずれてるのと機体を回転させた時の動きがおかしいとかでいまいちスッキリしません。
今回購入した互換GPSモジュールのケースには取付方向のマーク(矢印)が無くてとりあえず適当に取付けたのがまずいのではと思いキチンと取り付け直すことにしました。(3DR製のGPSモジュールのケースには方向マークの矢印が表示されている)
その為には、GPSモジュールのケースを開けてMagセンサー取り付け状態を確認しなければならなくなり、ケースを開けてみました。
HJ450 MultiWii QuadCopter:組立編#18 ~キャノピー(100均)取付ました~
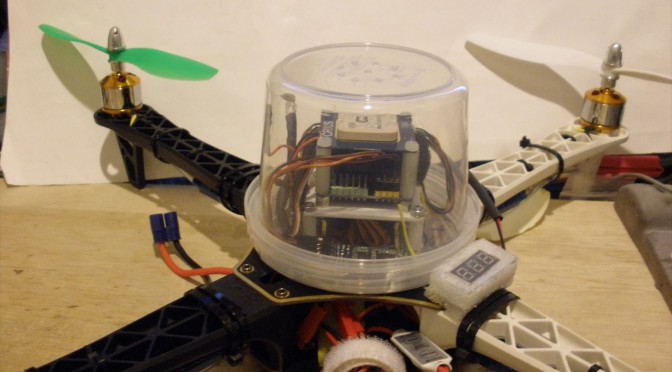
MAGセンサー干渉対策でボード取付位置を変更した時にケースに収まりきれずボード剥き出し状態になってましたが、
数日前のフライト時にペラ用コレットの締めが甘くて墜落させてしまいました、丁度落下地点が前日の雨でぬかるんでたことから、ボードが泥まみれになりました。
幸い清掃するだけでボードは問題なく動作したんですが、ここはやはりボードを保護する何がしかのカバーが必要だなと痛感し、皆さんが良くやる手の100均キャノピーを取り付けました。
HJ450 MultiWii QuadCopter:組立編#17 ~Magセンサー干渉対策(ESC編)~
前回、アラームブザーによるMAGセンサーへの干渉が大きいことを書きましたが、今回は続編でして、干渉元はモーター駆動電流です。
なんとかAltHoldが一段落したので以前から気になっていたGPSポジション・ホールドの「甘さ」を解決しようと手始めにMAGセンサー対策の続きをやりました。
