MissionPlanner経由でMagセンサー(磁気コンパス)のキャリブレーションをやったのですが機体の向いてる方角と実際の方角が微妙にずれてるのと機体を回転させた時の動きがおかしいとかでいまいちスッキリしません。
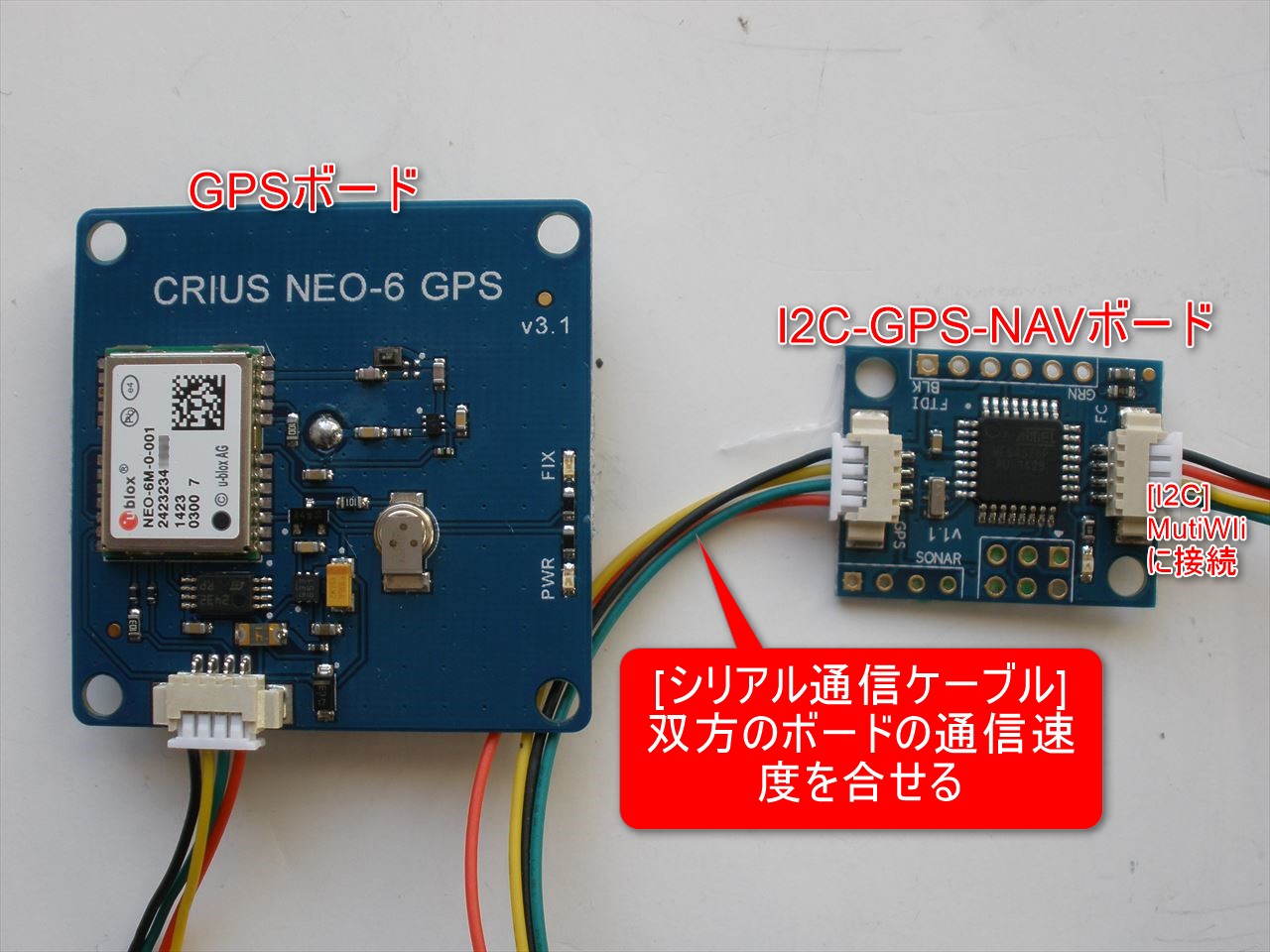
今回購入した互換GPSモジュールのケースには取付方向のマーク(矢印)が無くてとりあえず適当に取付けたのがまずいのではと思いキチンと取り付け直すことにしました。(3DR製のGPSモジュールのケースには方向マークの矢印が表示されている)
その為には、GPSモジュールのケースを開けてMagセンサー取り付け状態を確認しなければならなくなり、ケースを開けてみました。