
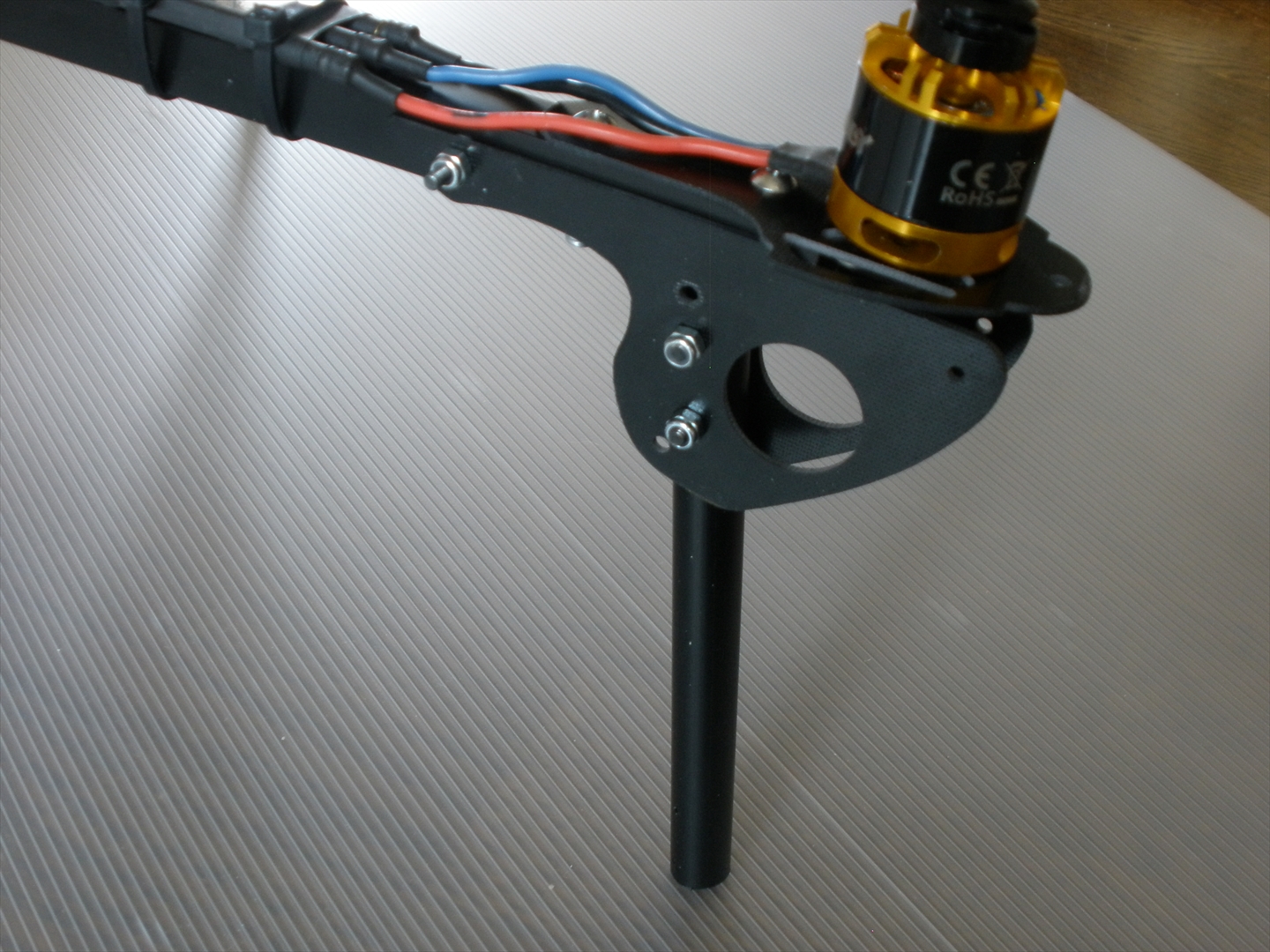
フライト中に、不注意にもLoiterモードからStablizeモードに変えてしまい高度5mぐらいから急降下、地面に激突してしまいSkid破損、以前から使ってみたかったT-ShapeSKid($18.03)をGLBで購入し換装しました。
重量増に対応するために同時に換装、
- ペラサイズ・アップ:9×4.7 ⇒ 10×4.5
- リポバッテリー容量アップ:2200mAh/3S ⇒ 3600mAh/3S
全装備状態:1425g ⇒ 1660g (注)GoPro+Gimbal+Lipo全搭載

フライト中に、不注意にもLoiterモードからStablizeモードに変えてしまい高度5mぐらいから急降下、地面に激突してしまいSkid破損、以前から使ってみたかったT-ShapeSKid($18.03)をGLBで購入し換装しました。
重量増に対応するために同時に換装、
全装備状態:1425g ⇒ 1660g (注)GoPro+Gimbal+Lipo全搭載
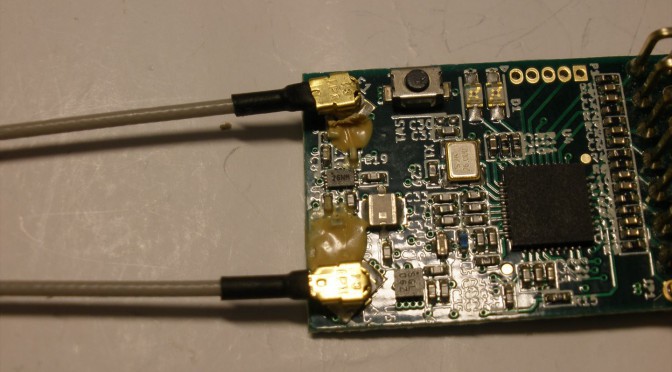
CPPM出力ができるということからX525にはFrSkyのDelta-8を搭載してましたが、先日アンテナ線の片方が切れているのたまたま発見、この状態で受信感度がどれだけ低下するのかを測定はしてないのですが、「もしかしたら制御不能になるかもしれない」と気にしながらのフライトは精神衛生上よくないので交換することに。
APM2.6のTelemetry通信には現在BT(Bluetooth)を使ってます、なので通信距離は数十m位しかありません。
機体操作にはプロポ(FutabaT10J)を使ってるので、BT通信切れしても操縦不能になり墜落とか行方不明になるわけではなく、機体からのセンサー情報などが読み取れなくなるだけですが、とても気にはなります。
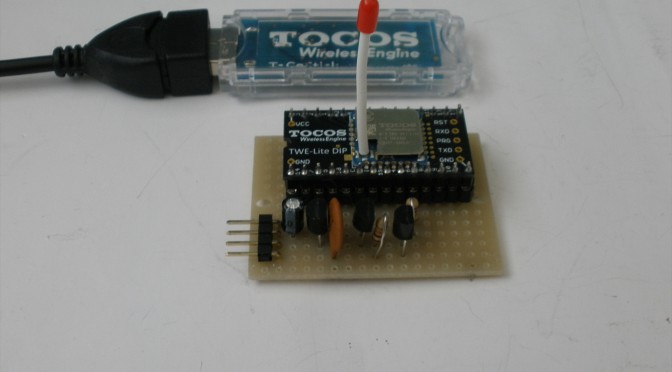
ということで、このBTをTWE-Lite(ZigBee派生)に置き換えてTelemetry通信距離を延ばそうと製作を始めました。
APMサイトではXBeeを推奨してますが、価格が安いのでこちらを使いました。シリアル通信に透過モードがあるのでAPM2.6、GCS共に修正不要でそのまま使えてます。
今回は、これを使った製作編の記事です。
続きを読む X525 ArduCopter :組立編#13 ~TelemetryにTWE-Liteを使う実験:①製作編~
コンパクト化ということでカニ足スキッドを撤去した時にジンバル位置をセンター近くに持ってきました。
ある程度予想はしてたんですが、いざ空撮してみると、スキッドとペラがしっかりと写りこんでました。
ということで、またまた機体改造に着手しました、と言ってもジンバルを前方に移動して画角範囲に写りこまないようにしただけですが。
移動前後が比較できるように2画面になるよう編集しました。
とりあえずGimbal+GoProを取り付けて空撮には成功したものの、機体の重量増による操縦性悪化がとても気になって、軽量化にトライしました。
軽量化のポイントはスキッド改造です。
カニ足スキッドは320gもあるので即撤去、これに変わるスキッドもどきをホームセンターで買った12㎜φのプラ・パイプ(ABS?)を加工して高さを稼ぎました。
この結果、全重量1665g ⇒ 1410gと255gの軽量化に成功です。
スキッドの軽量&コンパクト化が済んでからとも思ったんですが空撮画像を見たくてジンバルを搭載しました。
搭載したのはTarot T-2D、Brushless 2軸Gimbalでして半年ほど前にInfinityHobby(台湾)で$99とディスカウントしてたので即買いしたヤツです。購入後に知ったのですが、APMサイトでもコスパが良いと推奨してました。
取付から動作確認完了までの今回の手順です。
続きを読む X525 ArduCopter :組立編#10 ~Tarot T-2D Gimbal搭載までやっと出来ました~
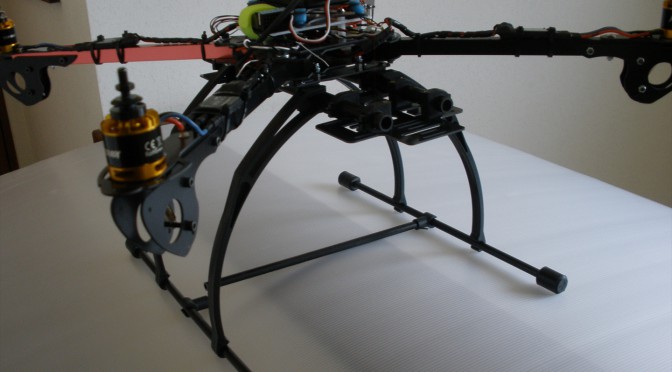
X525 ArduCopterのフライトにもかなり習熟してきたんで、そろそろ空撮始めようかと思いスキッドを取り付けてみました。
とはいえ、実のところ手持ちのCMOSカメラ(WingCam)で空撮は既に何回かやってみたんですが予想通りのコンニャク現象と冴えない画像でとてもアップする気にもなりませんでした、やはり空撮はGoPro3 + Gimbalでキチンと取付しないとダメなようです。
空撮用にと、TarotのT-2D Gimbal(2014/12、InfinityHobby購入、$99.00)とLandingSkid(2015/3、GLB購入、$28.20)は既に入手済みでしたが両方とも汎用品なので、また取付に際し四苦八苦するのが少々面倒ということもあり手付かず状態でした。
ArduCopterにはFollowMe、LookAtMe、Dronieなどの興味深い機能があるのですが、Gimbalが無いと楽しめないようなので一念発起してSKIDの組立&取付をはじめました。
組み立ててみると、結構大きいのと、重量があるので余り感心しません。重量配分は測定値で
総重量= 1,645g ⇒ 1,670g
う~ん、重いですなぁ、軽量化を考えないと・・・・、コンパクト化も考えないと運搬に苦労しそうです。(バイクでの移動が主となるので)
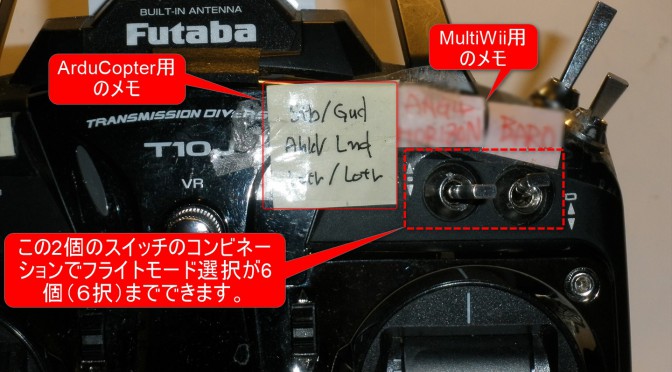
ArduCopterではフライトモード切替専用にch.5がアサインされていて、PWMの値で6個のフライトモードを選択することができます。
と言ってもプロポのスイッチは2点スイッチか3点スイッチしかないので、単純アサインではフライトモードは2個か3個だけしか選択できません。
皆さんがやってるように、6個のフライトモード選択ができるようにするにはプログラム・ミキシングを使い2個のスイッチ(2点スイッチ&3点スイッチ)の組み合わせでやるようにします。
自分が所有しているFutabaのT10Jでもプログラムミキシングを使うことでうまくできるようになったので設定方法をメモ代わりに記事にしました。
First Time SetUpページの最後のチャプターです。
全ESCの同時キャリブレーションはMultiWiiの方法とは違い専用ファームをインストールすることなく実行可能でとても便利、方法も通常のESCキャリブレーションと同じ要領なのでとまどうことも無く終了。
詳細手順はESC Calibarationページに書いてあるのでその通りやりましたが、最初のリポ電池接続後のLEDの点灯の仕方が記述と違うのがちょっと悩みました。(赤⇒黄⇒青と順番に点灯と書いてあるのですが黄LEDは見えませんでした、それと同時にビープ音(短2音の連続)が鳴るのですがこれでいいのかしらと途中心配になりました。
が、しかし結局のところ心配しただけで済み、問題なく終了しました。(実際は何回か繰り返してうまくいきました。)
このあとArm/Disarmをすぐに確認しましたがPreArmCheckに引っ掛かって失敗することがありました、うまくいくときもあったのですが要調査項目です。
初フライトまでまだまだ時間がかかりそうです。(残念!)
以上
AudoCopterサイト内のFirstTimeSetupというチュートリアルに従って進めてますが、今回からはMandatory Hardware Configurationに突入です。文字通りMandatoryなので必須アイテムですね。
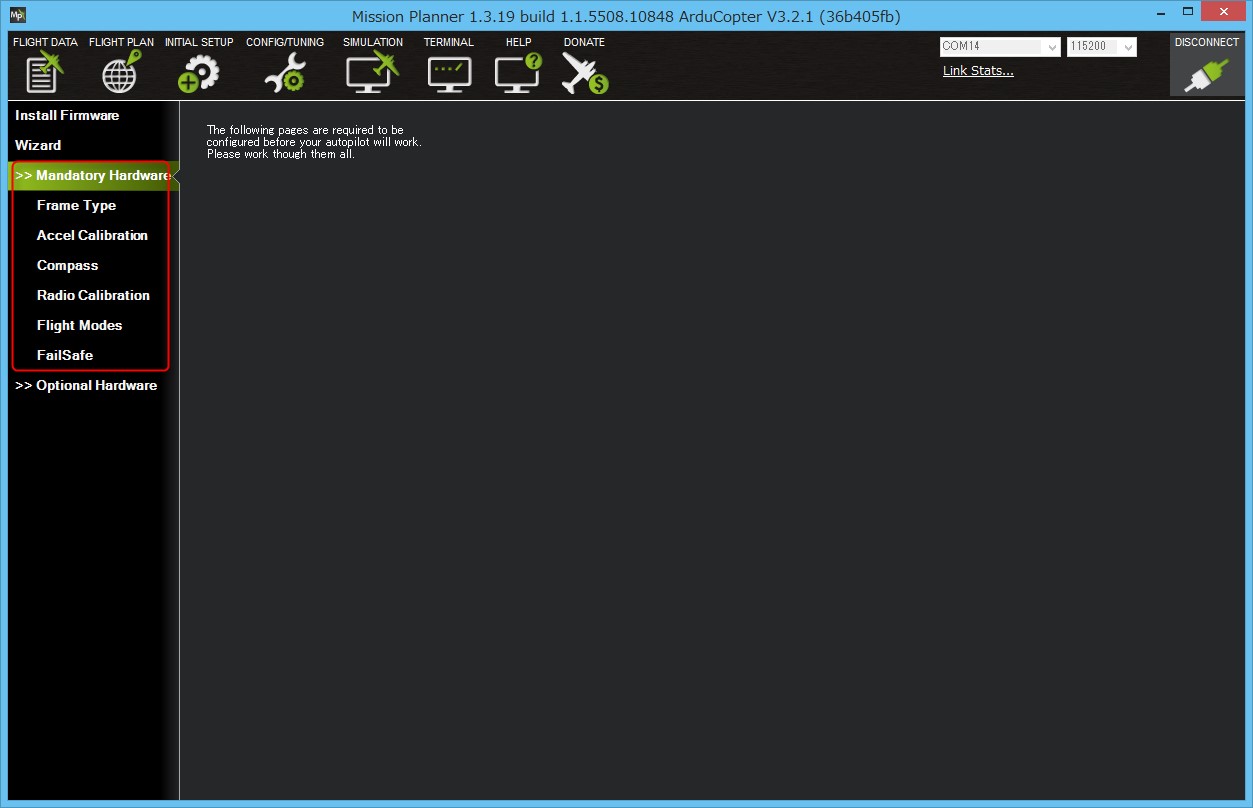 MandatoryHardwareConfigurationアイテムとは以下の項目です、
MandatoryHardwareConfigurationアイテムとは以下の項目です、
続きを読む X525 ArduCopter :組立編#6 ~MissisonPlanner[初期設定:その2]~MandatoryHardwareConfiguration~



![X525 ArduCopter :組立編#6 ~MissisonPlanner[初期設定:その2]~MandatoryHardwareConfiguration~](https://umek.topaz.ne.jp/rcsky/wp-content/uploads/2015/03/2015-03-12_17h06_58-672x372.jpg)