![X525 ArduCopter :組立編#5 ~MissisonPlanner[初期設定:その1]ファーム更新~](https://umek.topaz.ne.jp/rcsky/wp-content/uploads/2015/03/2015-03-12_12h38_08e-672x372-1426138047.jpg)
MissionPlannerを使っての初期設定に進みます、まずはコントローラ・ファームの更新作業です。
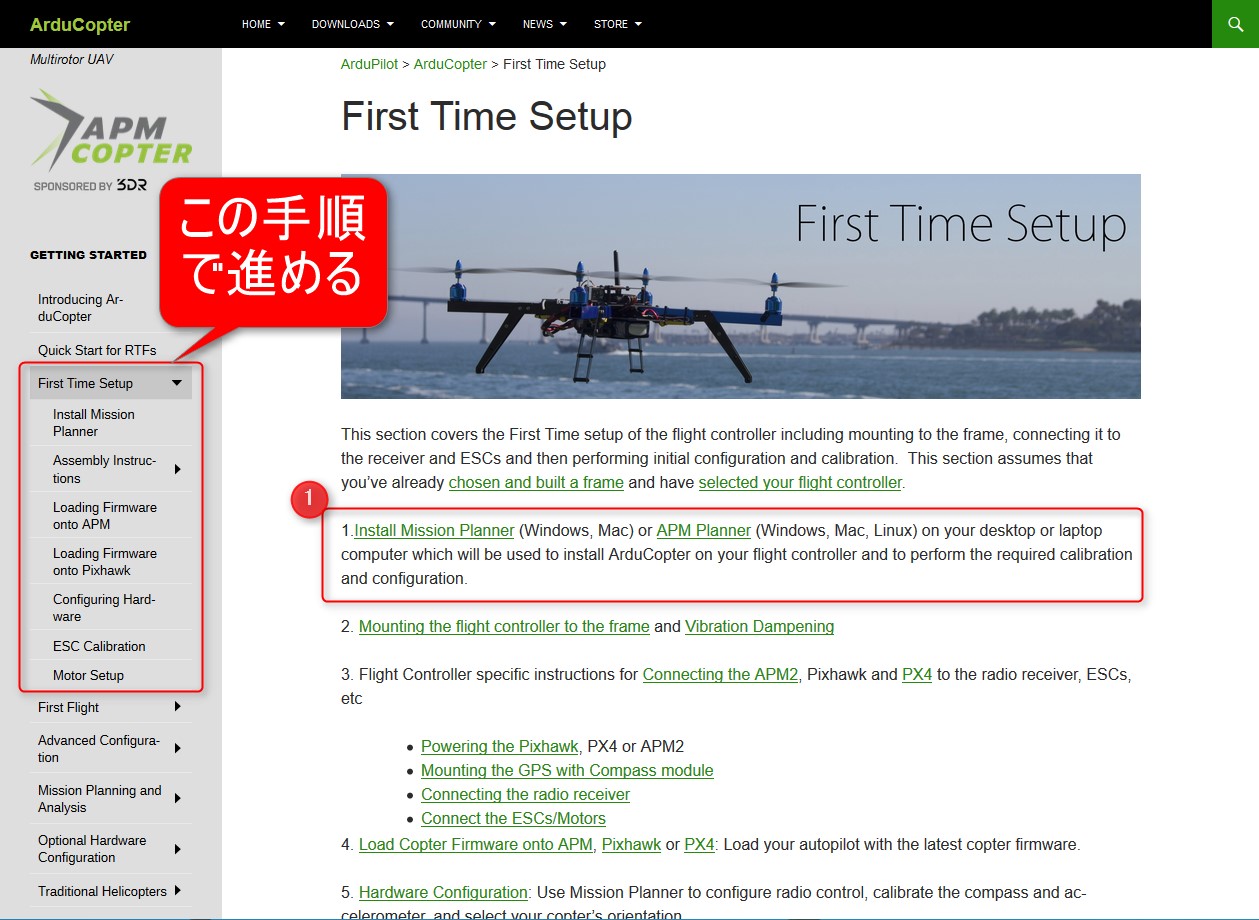
ArduCopterサイトのこのページを参考にしました。(と言っても簡単な作業なので見なくてもできちゃいます)
当初、通信エラーで悩まされましたが、それも解決して順調に更新できました。(通信エラーの詳細は後ろの方に書いてます)
起動すると以下の画面になります、ファーム更新メニューはINITIAL SETUPに有ります。
 尚、MultiWiiではファーム更新は設定ソフトのMultiWiiConfとは別にArduinoIDEを使いましたがArduCopterはこのMIssionPlannerですべて完結。
尚、MultiWiiではファーム更新は設定ソフトのMultiWiiConfとは別にArduinoIDEを使いましたがArduCopterはこのMIssionPlannerですべて完結。
以下に、詳細手順をメモりました。
続きを読む X525 ArduCopter :組立編#5 ~MissisonPlanner[初期設定:その1]ファーム更新~