MissionFlight失敗編というタイトルですがArduCopter自身がMissionFlight に失敗してコースアウトしたという訳ではなくてルートの設定ミスをやっちゃって「木に激突」という結果を招きました。
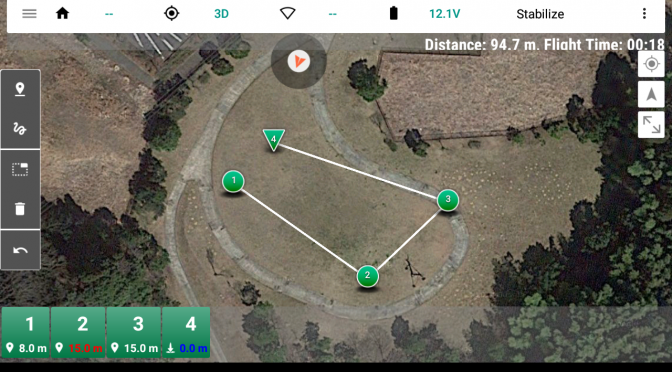
Missionのルート決めはAndroidタブレット上でGoogleMapを見ながら希望のWayPointをタッチしていきますが、この時Map上では高さのある物体(建物、木など)は判別がほとんど不可能です。
今回のMissionFlightではWayPoint5の地点に丁度、高さ10~15m程度の立木がありこれに気付かずに設定してしまいました。
MissionFlightそのものは正確にWayPointをトレースしていったので最後に木に激突でジ・エンドということになりました。
動画の最後の方にも教訓としてコメントしましたが。
教訓:
①WayPoint設定には注意しましょう。
*GoogleMap画面だけでなく実際の場所をよく観察すること。
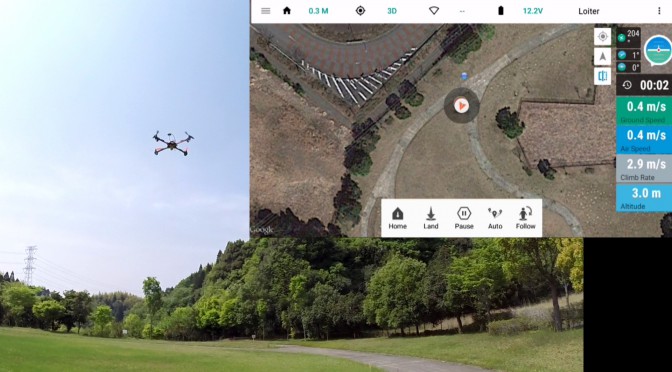
②MissionFlight中断の操作方法を練習しておきましょう。
*Stickは無効になってるので、まずはLoiterモードに戻すこと、
但し、スロットル・スティックはセンターにしておかないと
意図しない上昇・下降に見舞われ。更にパニクります。
以上、皆さんも気を付けてください。


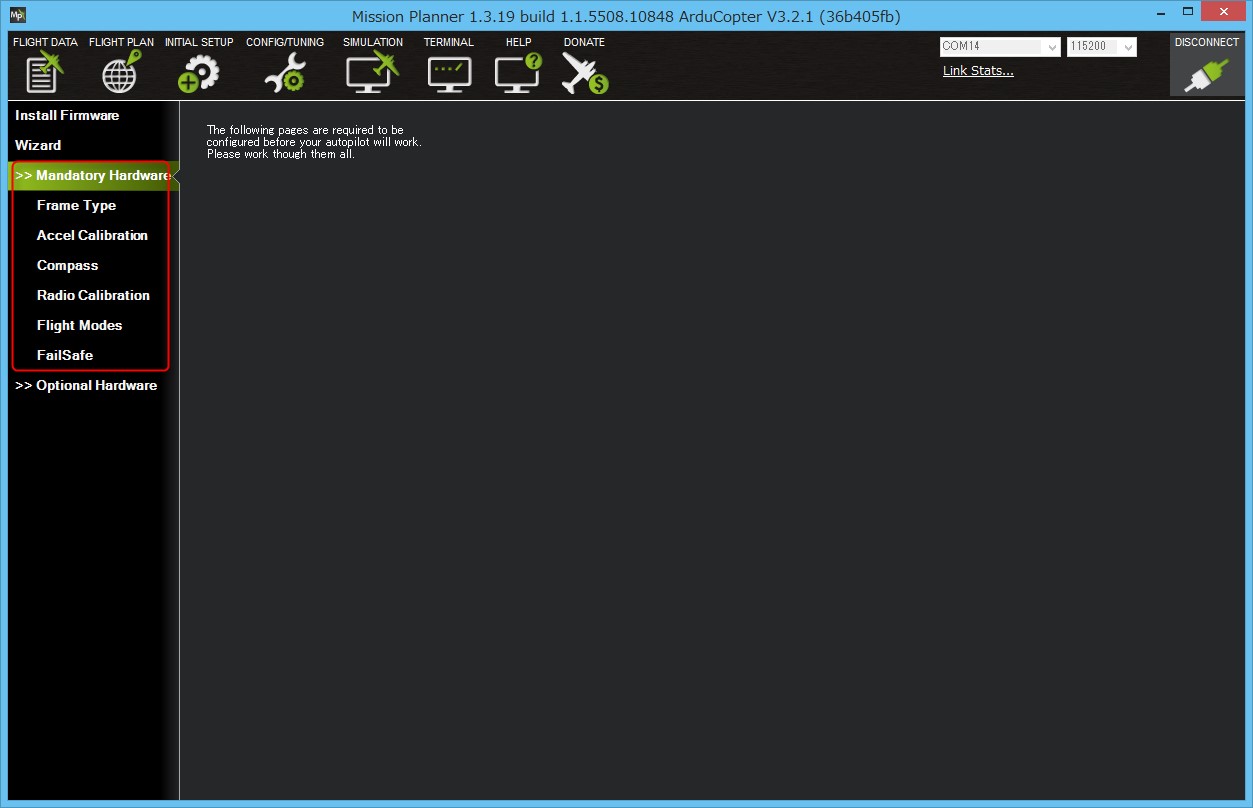
![X525 ArduCopter :組立編#6 ~MissisonPlanner[初期設定:その2]~MandatoryHardwareConfiguration~](https://umek.topaz.ne.jp/rcsky/wp-content/uploads/2015/03/2015-03-12_17h06_58-672x372.jpg)
![X525 ArduCopter :組立編#5 ~MissisonPlanner[初期設定:その1]ファーム更新~](https://umek.topaz.ne.jp/rcsky/wp-content/uploads/2015/03/2015-03-12_12h38_08e-672x372-1426138047.jpg)