以前から気になってたDronieを試しにやってみました。
Dronieとは「ドローンを使っての自撮り」のことを意味しててスマホとかでの自撮りのSelfieをもじってできた言葉のようです。
3DR社のサイトに詳しく書いてありますが、中身は英語なので面倒な人はYouTubeのサンプル画像を見れば何のことかよくわかりますよ。

Tarotジンバルを搭載したので早速、空撮フライトやってきました。MissionFlightでの空撮フライトもしてきたんですが、動画編集に手間取ってるので先にFollowMeモードのレポートをします。
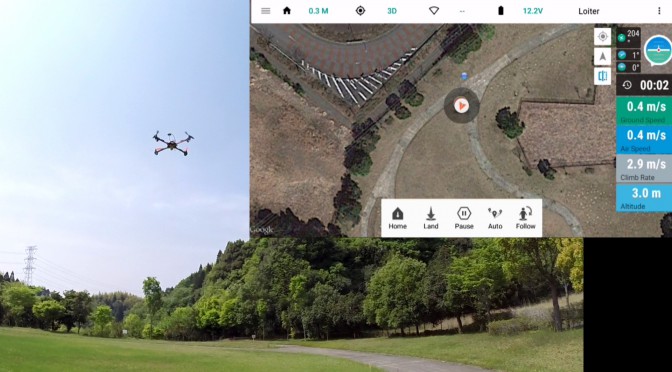
FollowMeモードとは、ArduCopterが操縦者を追跡していくというフライトモードのことを言ってまして仕組みはいたって単純でして、
という具合で実現してます。
実際のフライトの模様をTarotジンバル+GoPro3で動画に収めてみました。
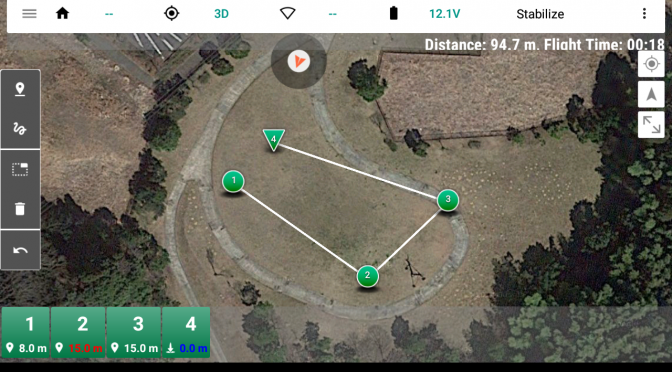
Autoモードでのミッション・フライトを試して来ました。Loiterモード、RTLモードなどのGPSを利用した自律飛行がうまくいっていってるので、さほど心配なくトライできました。
近くの広場でのテストフライトということで、飛行ルートもコンパクトにして高度も10m前後ととてもイージーなルートのフライトです、結果は大成功です。
手順は大まかに以下の様になります。
(注)GCSとはGroundControlStationsの略で、地上側で機体制御(情報取得・設定・操作など)を行う物で実際にはPCとかスマホ、タブレット上で動作するソフトウェアのことです。(ここに詳しく書かれてます)
自宅PC(Windows8.1)ではMissionPlanner、屋外ではNexus7(AndroidTablet)でTower(DroidPlanner3)を使ってます。
ArduCopterX525とNexus7間の通信はBT(Bluetooth)を使用してますが到達距離が数10m程度しかないのでフライト中に通信中断が何回も発生します。この通信は情報取得にしか使ってないのでフライトには全然影響はないのですが少々気になりますね。(将来的にはZigBeeに置き換えようと思ってます)
このGCSとArduCopterの組み合わせとても多彩でして、面白そうな機能が沢山あります、順次実験していきたいと思います。
以上
突然の急降下対策以降は安定したフライトが続きRTLモード、Autoモードも安心してトライできるようになりましたが今回はRTLモードの割と判り易い動画が撮れたのでレポートしようと思います。
ご存知の様に、このRTLモードとはLaunchポジションへ強制帰還させるモードでして、はるか遠方に行ってしまった機体を無事に戻す時など非常に有用な機能です、Phantom2、MultiWiiにももちろん搭載されています。
マルチコプターは飛行機と違い対称形しているため距離が離れた時には姿勢確認がとても難しく、プロポ操作しても近寄るどころかどんどん離れて行きひやっとしたことが何度もありましたが、この機能のお陰で機体ロストから回避できたことが何度もあります。
RTLモードでのテストフライトを動画に収めておきました、興味のある方は一度見てみてください。
「続きを読む」の方に情報整理を兼ねて詳細にメモリました。
続きを読む X525 ArduCopter :フライト編#3 ~RTL(ReturnToLaunch)モードをレポート~
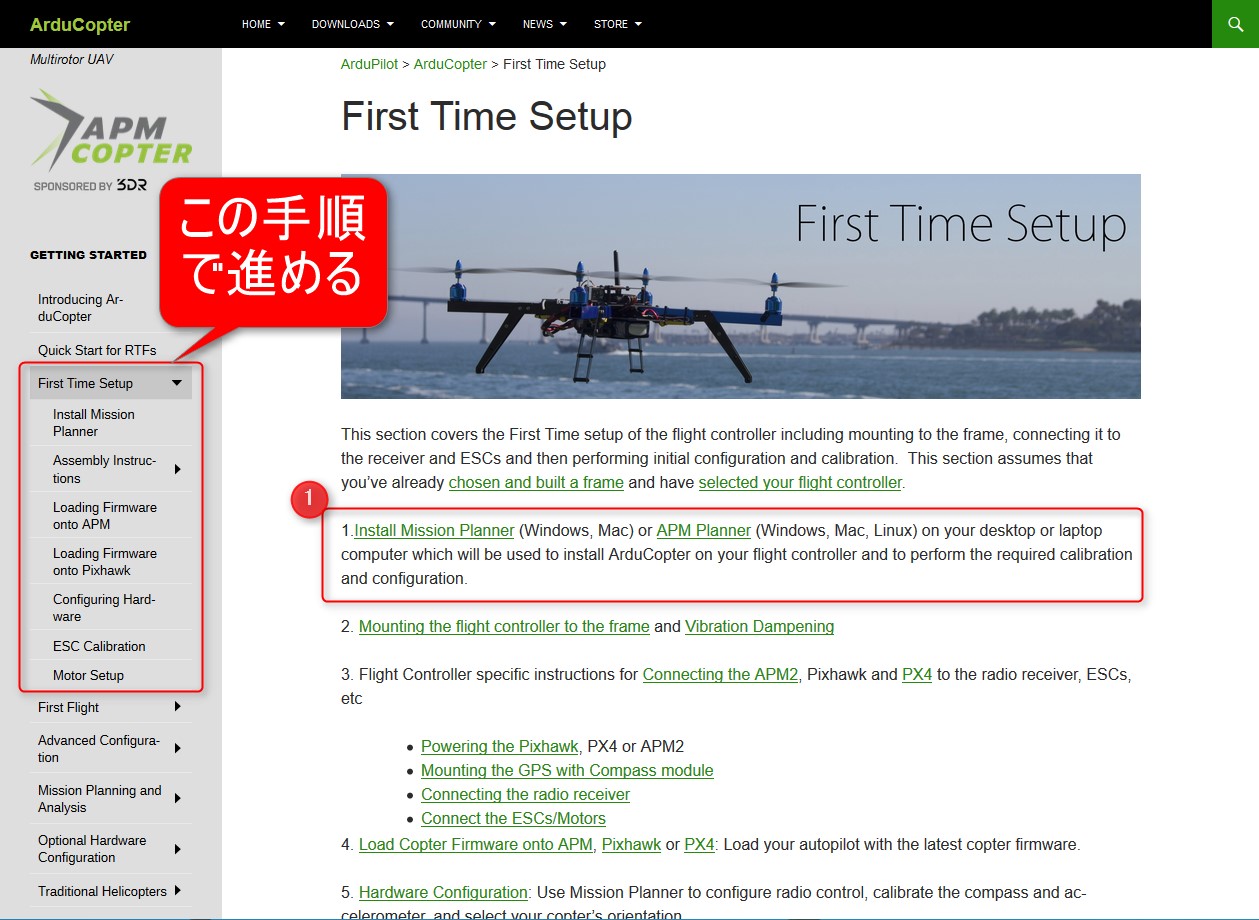
ArduCopterもMultiWiiと同じくOpenCommunityなのですが3DRがスポンサーしているせいかサイトはきちんと情報が整理されててMultiWIiみたいにあちことネットを探し回って情報を掻き集めなくて良いのが助かります。更に嬉しいことにTutorialが提供されてます。
ということから、これからはこのサイトのFirstTimeSetup手順に従って組立を進めて行こうと思います。
まずは、最初のステップ①ですのでMissionPlannerのインストールですね。
 続きを読む X525 ArduCopter :組立編#2 ~MissionPlanner(Windows)をインストール~
続きを読む X525 ArduCopter :組立編#2 ~MissionPlanner(Windows)をインストール~