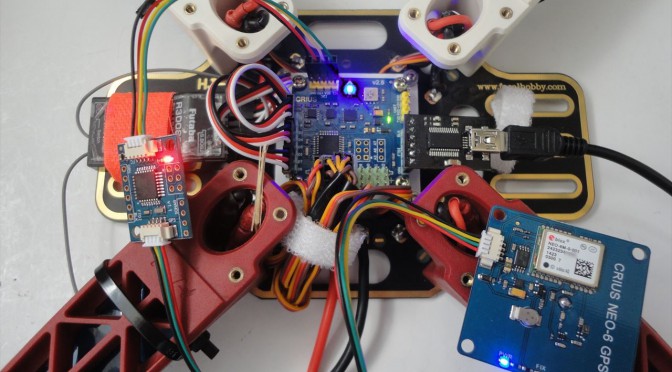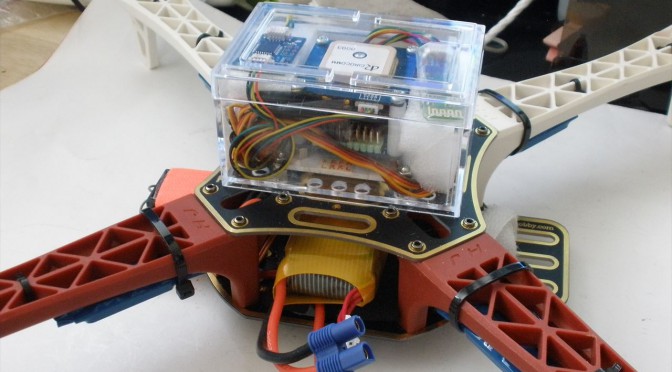
GPSボードの機体組付けをやりました、当初は両面テープでセンターボードの上にでも貼り付ければOKぐらいに考えてましたが、MultiWiiボード上のLED(青)の視認性アップのためのセンターボード上部への引っ越しもしたかったこともあり、ボード2枚を二階建て構造にし最上段に取り付けることにしました。そして更に、ボード全体を囲うプラケースも追加しました。
ということで、思いのほか手間がかかりましたがスッキリとまとまりとりあえず満足してます。やったことは以下の通りです、
- MultiWiiとGPSを二階建て構造にして最上段に取付
- ボードを囲うプラケース(100均)を追加
- リポバッテリーは真ん中段に移動