APM2.6のTelemetry通信には現在BT(Bluetooth)を使ってます、なので通信距離は数十m位しかありません。
機体操作にはプロポ(FutabaT10J)を使ってるので、BT通信切れしても操縦不能になり墜落とか行方不明になるわけではなく、機体からのセンサー情報などが読み取れなくなるだけですが、とても気にはなります。
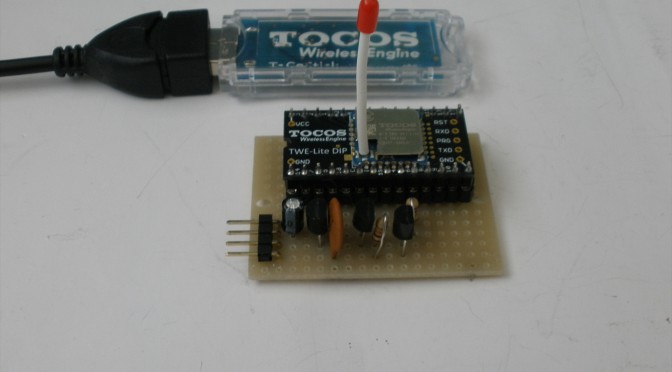
ということで、このBTをTWE-Lite(ZigBee派生)に置き換えてTelemetry通信距離を延ばそうと製作を始めました。
- 機体側:TWE-Lite DIPを使用(1500円@aitendo)
- 地上側:ToCoStickを使用(2760円@aitendo)
APMサイトではXBeeを推奨してますが、価格が安いのでこちらを使いました。シリアル通信に透過モードがあるのでAPM2.6、GCS共に修正不要でそのまま使えてます。
今回は、これを使った製作編の記事です。
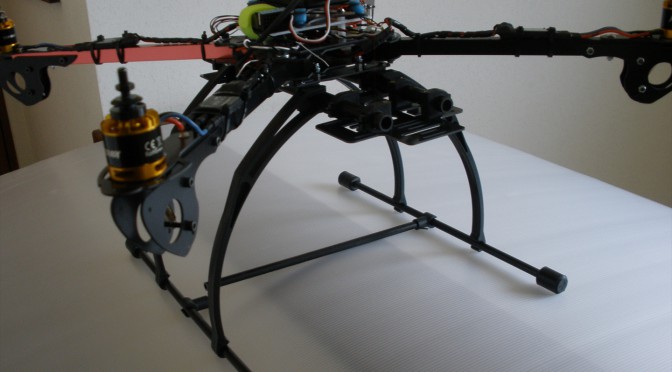
続きを読む X525 ArduCopter :組立編#13 ~TelemetryにTWE-Liteを使う実験:①製作編~