
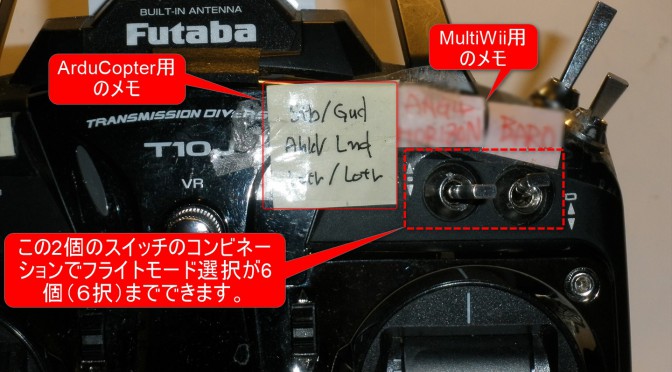
ArduCopterではフライトモード切替専用にch.5がアサインされていて、PWMの値で6個のフライトモードを選択することができます。
と言ってもプロポのスイッチは2点スイッチか3点スイッチしかないので、単純アサインではフライトモードは2個か3個だけしか選択できません。
皆さんがやってるように、6個のフライトモード選択ができるようにするにはプログラム・ミキシングを使い2個のスイッチ(2点スイッチ&3点スイッチ)の組み合わせでやるようにします。
自分が所有しているFutabaのT10Jでもプログラムミキシングを使うことでうまくできるようになったので設定方法をメモ代わりに記事にしました。



![X525 ArduCopter :組立編#6 ~MissisonPlanner[初期設定:その2]~MandatoryHardwareConfiguration~](https://umek.topaz.ne.jp/rcsky/wp-content/uploads/2015/03/2015-03-12_17h06_58-672x372.jpg)
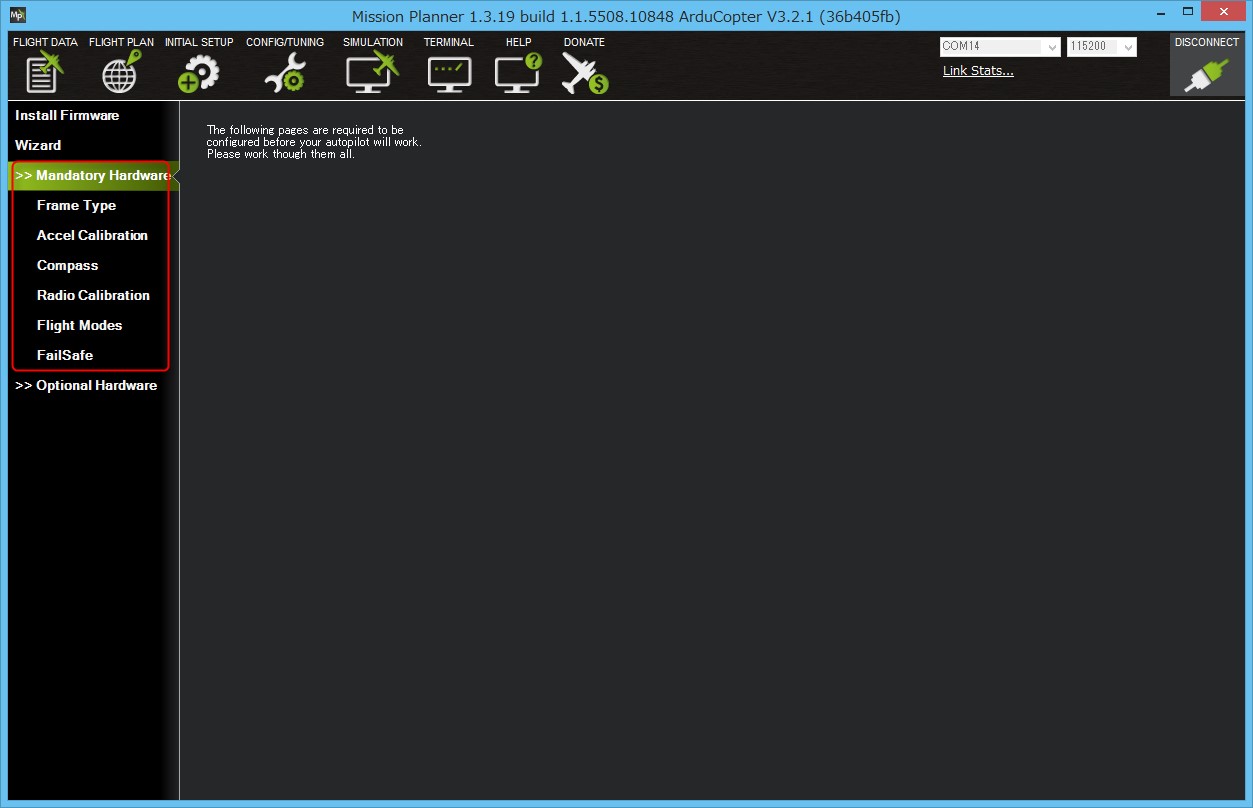
![X525 ArduCopter :組立編#5 ~MissisonPlanner[初期設定:その1]ファーム更新~](https://umek.topaz.ne.jp/rcsky/wp-content/uploads/2015/03/2015-03-12_12h38_08e-672x372-1426138047.jpg)

