
micro:bitでMOVE miniを動かしてみる[組立編]
Kitronikというイギリスの会社からMOVE miniという二輪バギーキットが発売されてます。
サーボモーター2個をmicrobitで制御してBluetooth経由での前後左右への走行制御ができるようになってます。
秋月電子から購入(\3850税込)したの製作記事をアップします、数回に分けて紹介します、まずは組立編です。

組立時間は正味1時間程度です。説明書通りに進めていくと組立の途中で、①サーボモータキャリブレーション、②BLEペアリングといった調整・設定作業が入ります、説明書をよく読まずに一気に組み立てをしてしまうと、せっかく組み立てたのに分解・再組立てをすることになりますので注意が必要です。
実は私も説明書を斜め読みし、どんどん組み立ててしまい2回ほど分解する羽目になりました(笑)
では、順を追って組立手順を説明していきます。
目 次
手順1.箱を開けて中味を確認。
写真では判りませんが、外箱は割と小さくて7インチタブレット程度の大きさです。↓

箱の中にはこんなのが入ってました。↓

手順2.ServoLitePCBをmicro:bit取り付ける
説明書の中に組立イラスト図があります、↓

ServoLitePCB↓
左の袋の中はスペーサーと取付ネジ(5本)

オモテ面です。↓
- PIXEL1~PIXEL5とマイキングされている白い角型の素子はフルカラーLEDです。
Adafruits製のNeoPixel互換ということです。 - 上部にOFF/ONのスイッチが付いてます。
- Servo接続用のパッドが3か所あります、2か所はヘッダーが半田付けされてますが、残り1か所は未半田。

ウラ面です。↓
- 単4電池が3本入る電池ケースが付いてます。
- ケース両サイドにサーボ接続用のヘッダーが実装されてます。

micro:bit(右)とServoLite(左)↓
穴が5個あいた白い棒状のものはプラスティックで両方のボードの間に挟み込む「スペーサ」です。

ネジを絞めて取り付けます↓
ネジは軽く締めるだけでOK、締めすぎるとネジ山が潰れます、基板の間にスペーサーが挟まっているのが見えます。
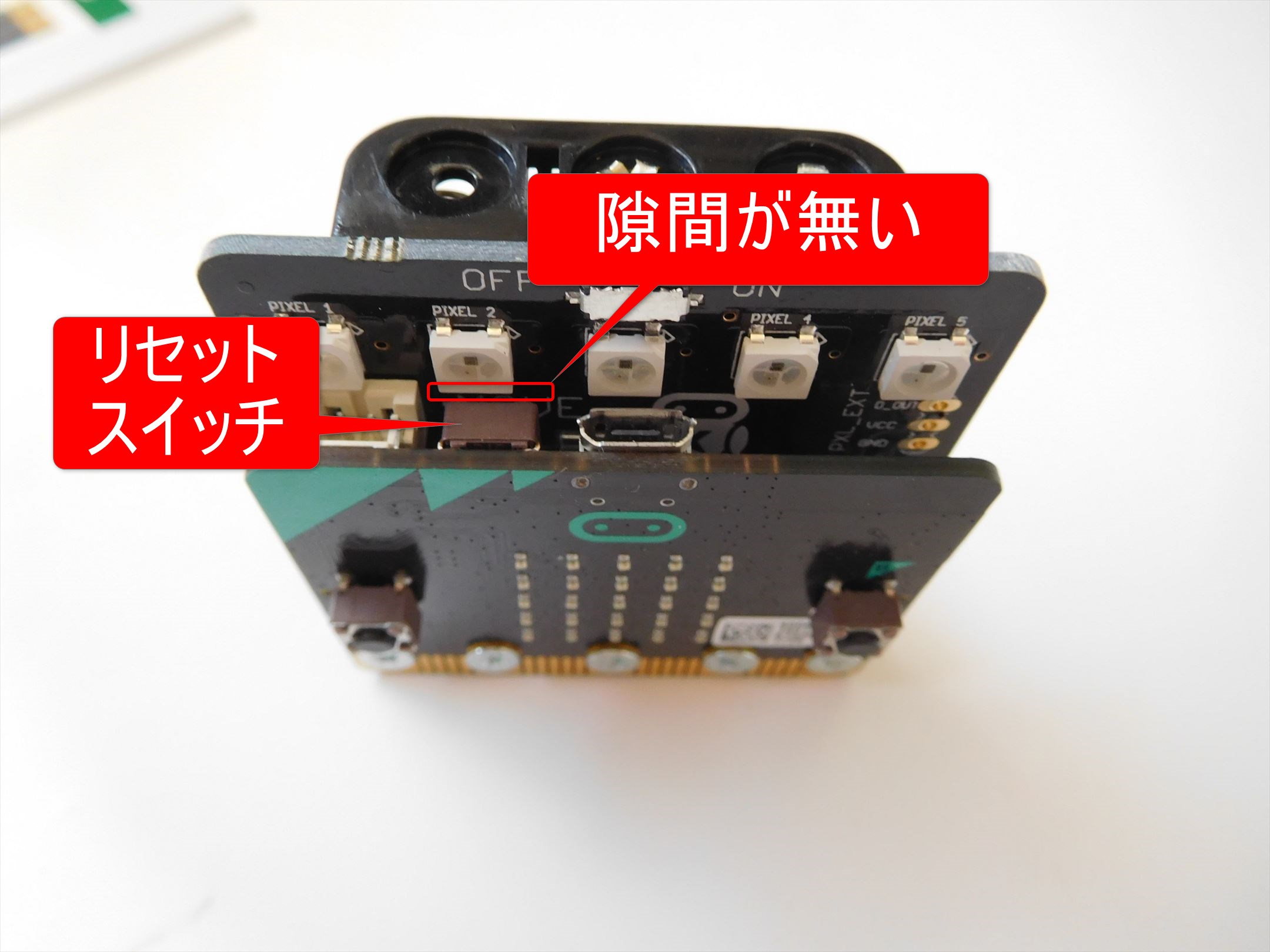
実はここでボードを組み付けると隙間がなくなりリセットボタンを押すのに非常に苦労します。Bluetoothのペアリング時にこのリセットボタンを押すことが必要になります。
でも、そのときだけネジをちょっと緩めればよいので、ここではそのまま組み付けてしまいます。

リセットスイッチの隙間↓
ほとんどなくて押すのが困難、指で押すのは不可能(楊枝を使うという裏ワザもあり)
手順3.車輪を組み立てる
説明書ではこの手順の前にLED点灯確認をプログラムを使ってすることになってますがスキップして車輪の組み立てに入ります。
車輪組立部品↓
車輪(左)は裏表無しだが、サーボホーン(右)は裏表がるので要注意。

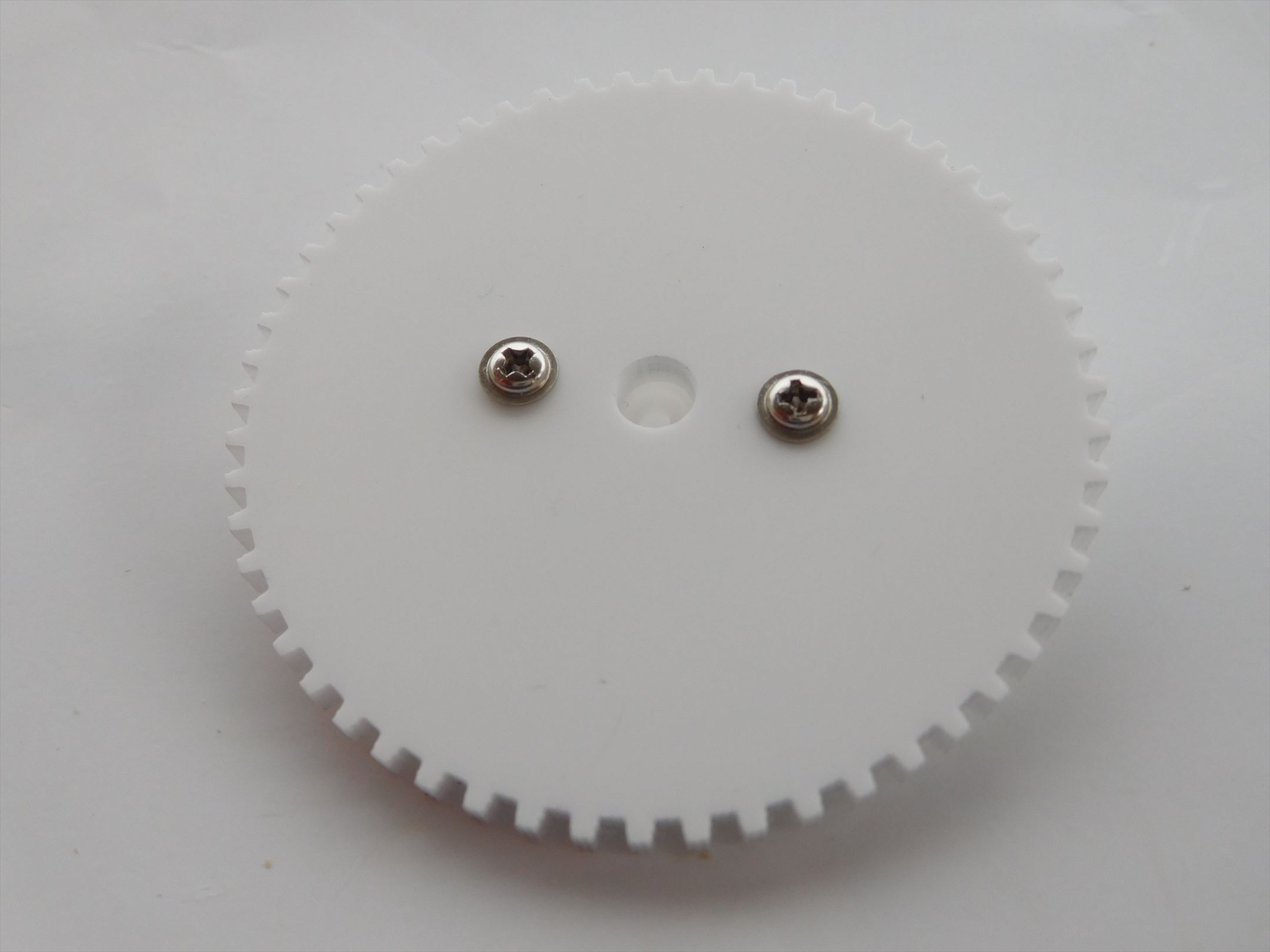
サーボホーン↓
赤丸で示した穴を使う。

車輪にネジ止め↓
上に示した、赤丸を使いネジ止め(2箇所)

サーボモータに車輪を取り付ける↓
サーボモーターに車輪を嵌め込ム、仮作業のため取付ネジ止めは不要。
手順4. サーボモータのキャリブレーション
サーボモーターを車体に取り付ける前にキャリブレーションをします。
サーボテストのプログラムを作成↓
Javascript宇ロックエディタを使い以下のプログラムを作成し、microbitにダウンロードする。
ServoCalibration用ファイル:”microbit-Servo_test1.hex”


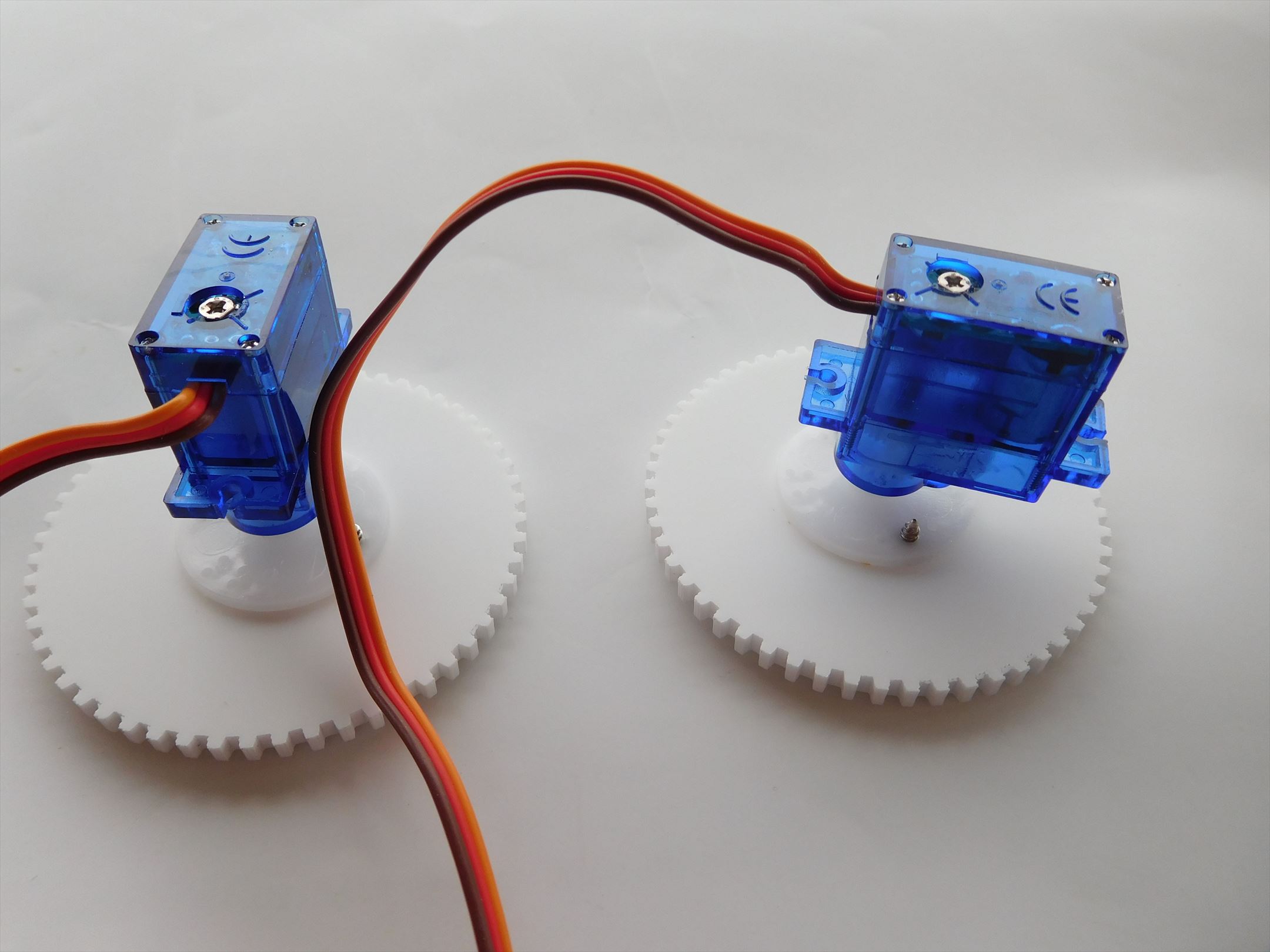
サーボモータキャリブレーション↓
ServoLiteボードにサーボモータ(2個)を接続し電池(単4x3本)を挿入しスライドスイッチをオンさせる。
この状態でAボタンを押すと両方のサーボモーターが回転し始める、更にBボタンを押すと今までとは逆方向に回転する、そしてAボタン、Bボタン共に停止する。(ハズ)
もし、停止しない場合はキャリブレーションが必要。
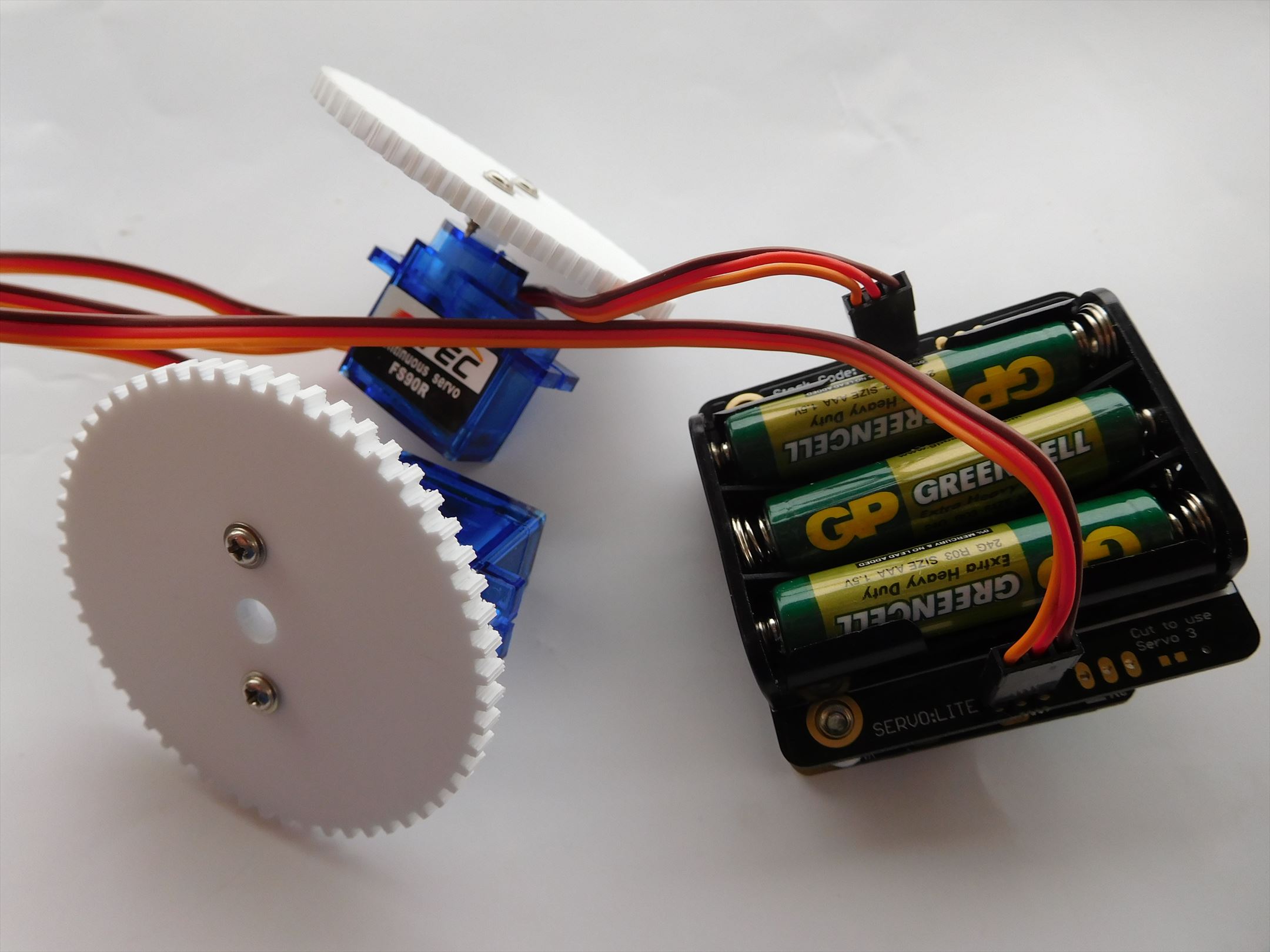
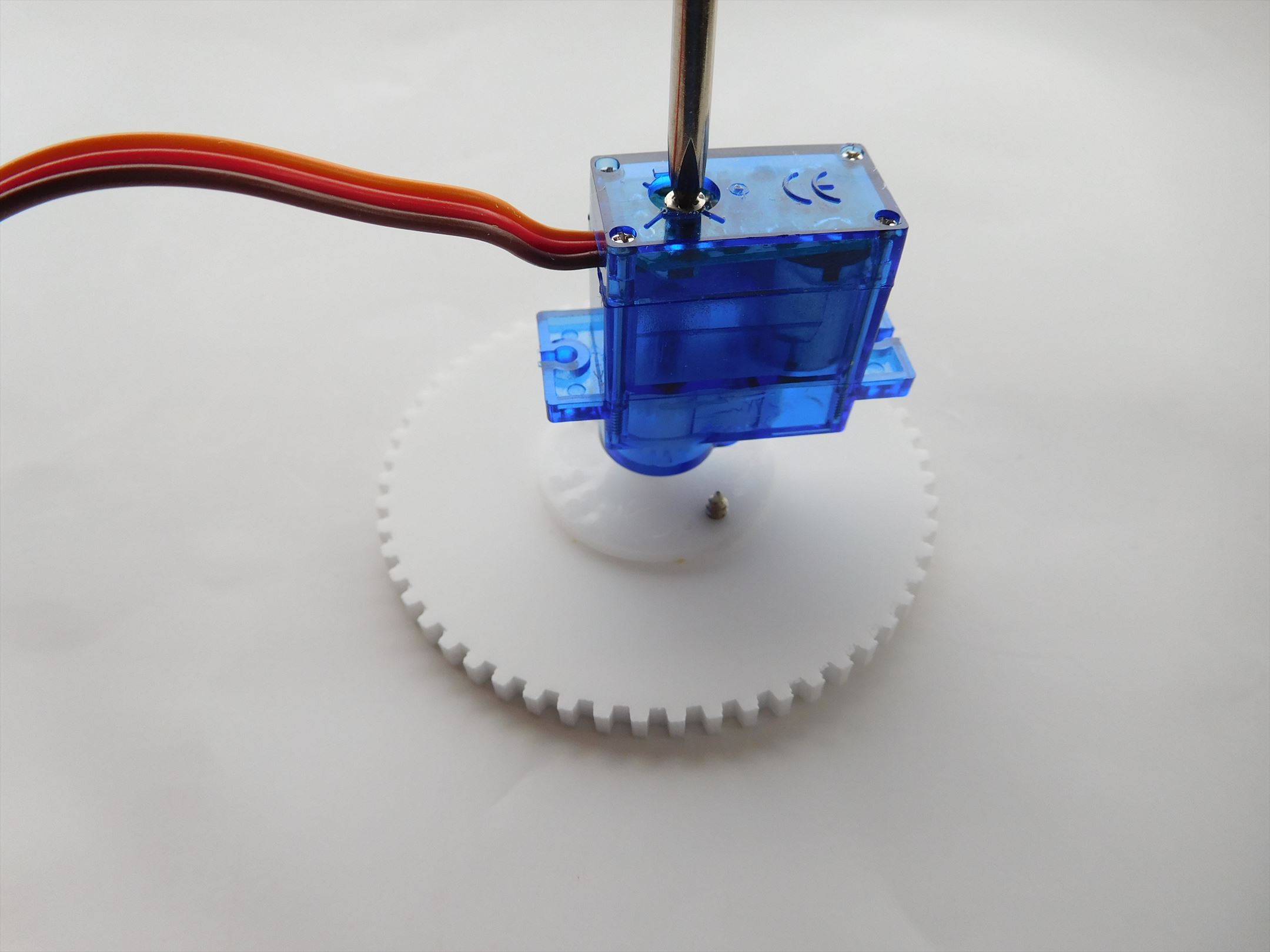
キャリブレーション用ネジ↓
停止しない場合は、下の画像にあるように時計ドライバーなどの小さなドライバーでネジをまわして停止する位置に合わせます。(AボタンとBボタンを同時押しの時に停止しないと時にするのを忘れないように)
当たり前ですけど、この画像の様に車輪を下にしたらサーボ本体が回るので片手にサーボモーター、もう片手にドライバーという姿勢でするように。
手順5. ボディを組み立てる
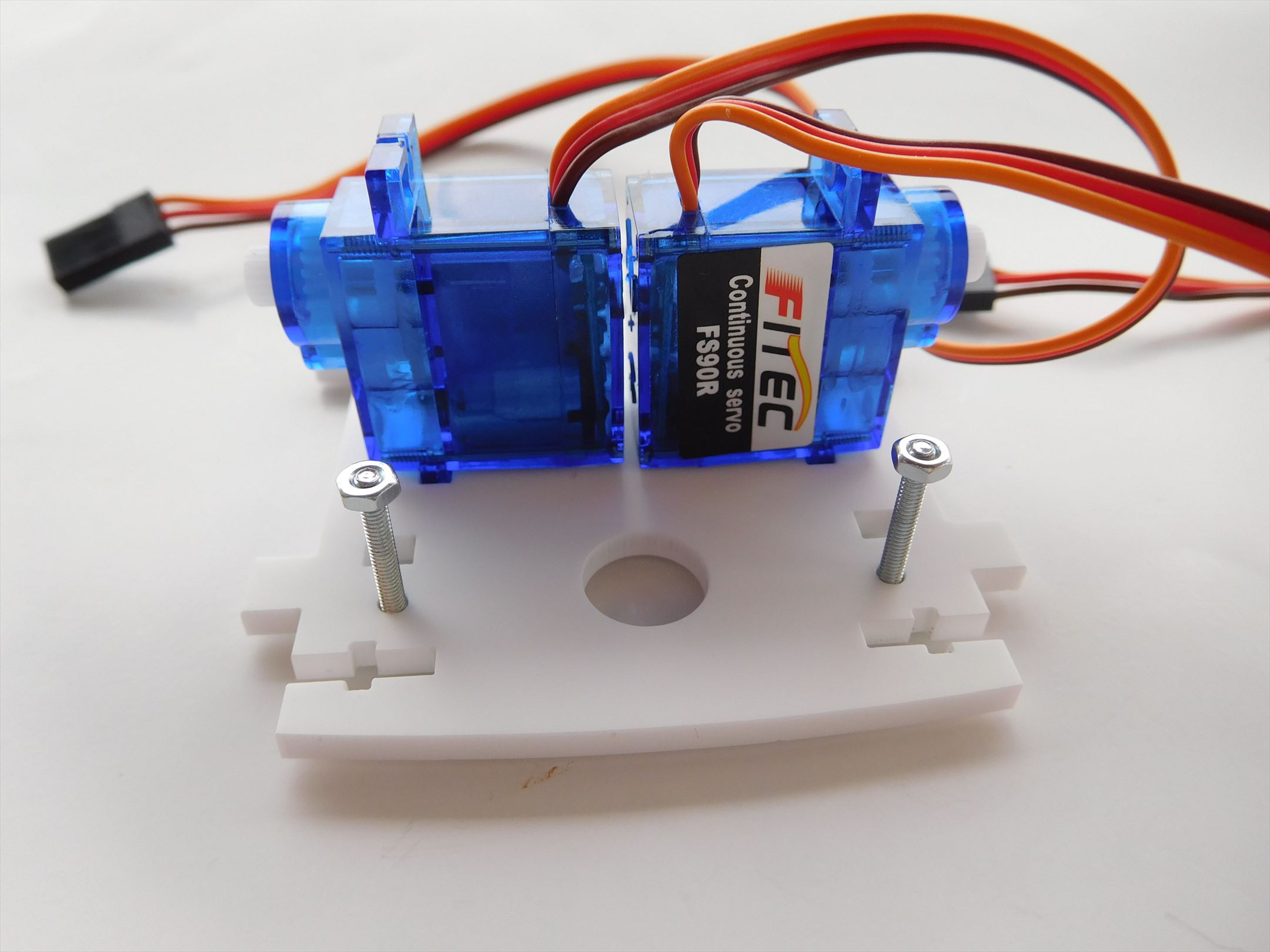
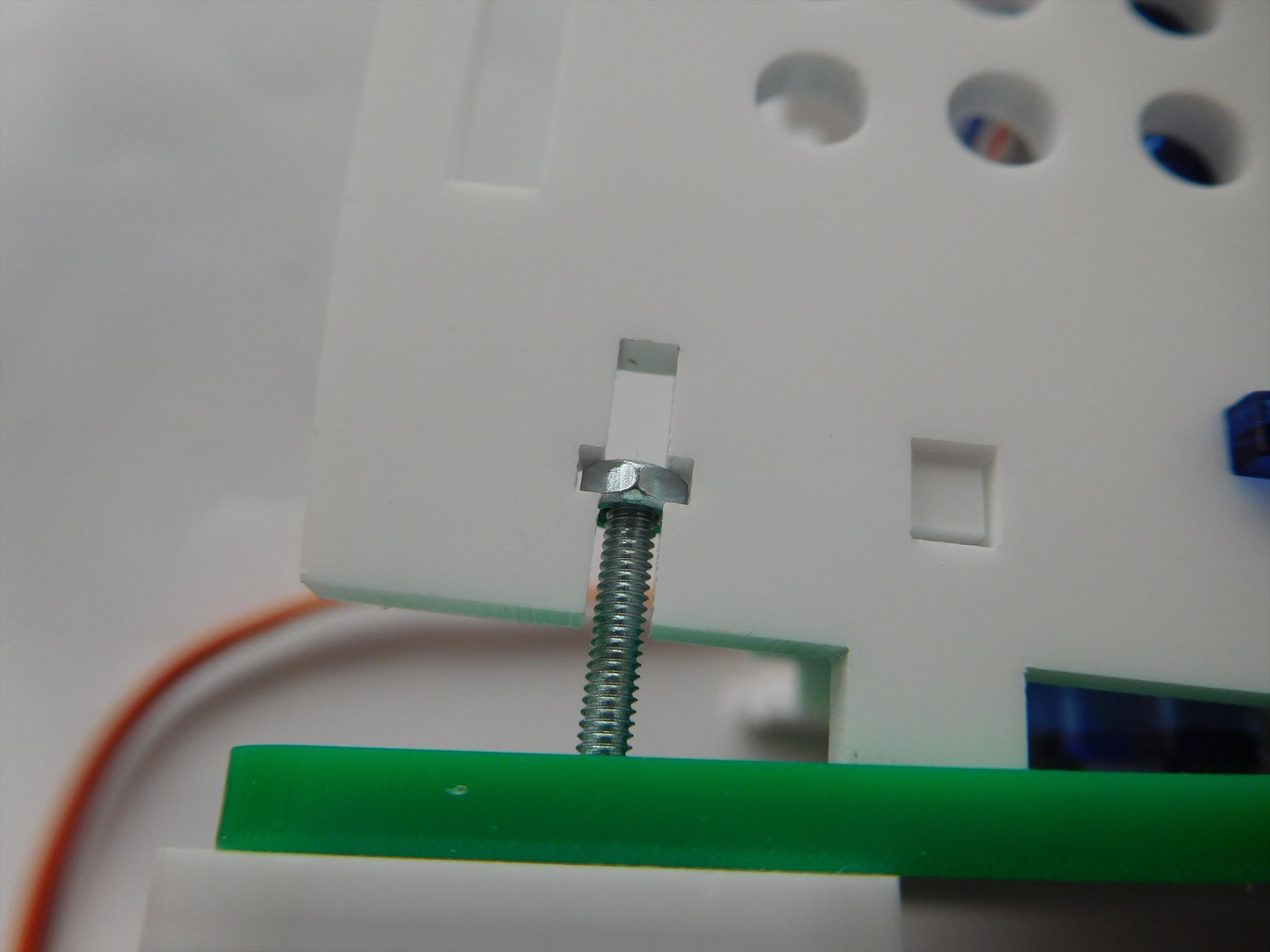
底板にネジを取り付ける↓
ナットも同時に付けておく、但し、ネジの先端部分に少し入れるだけにして奥まで入れないこと。

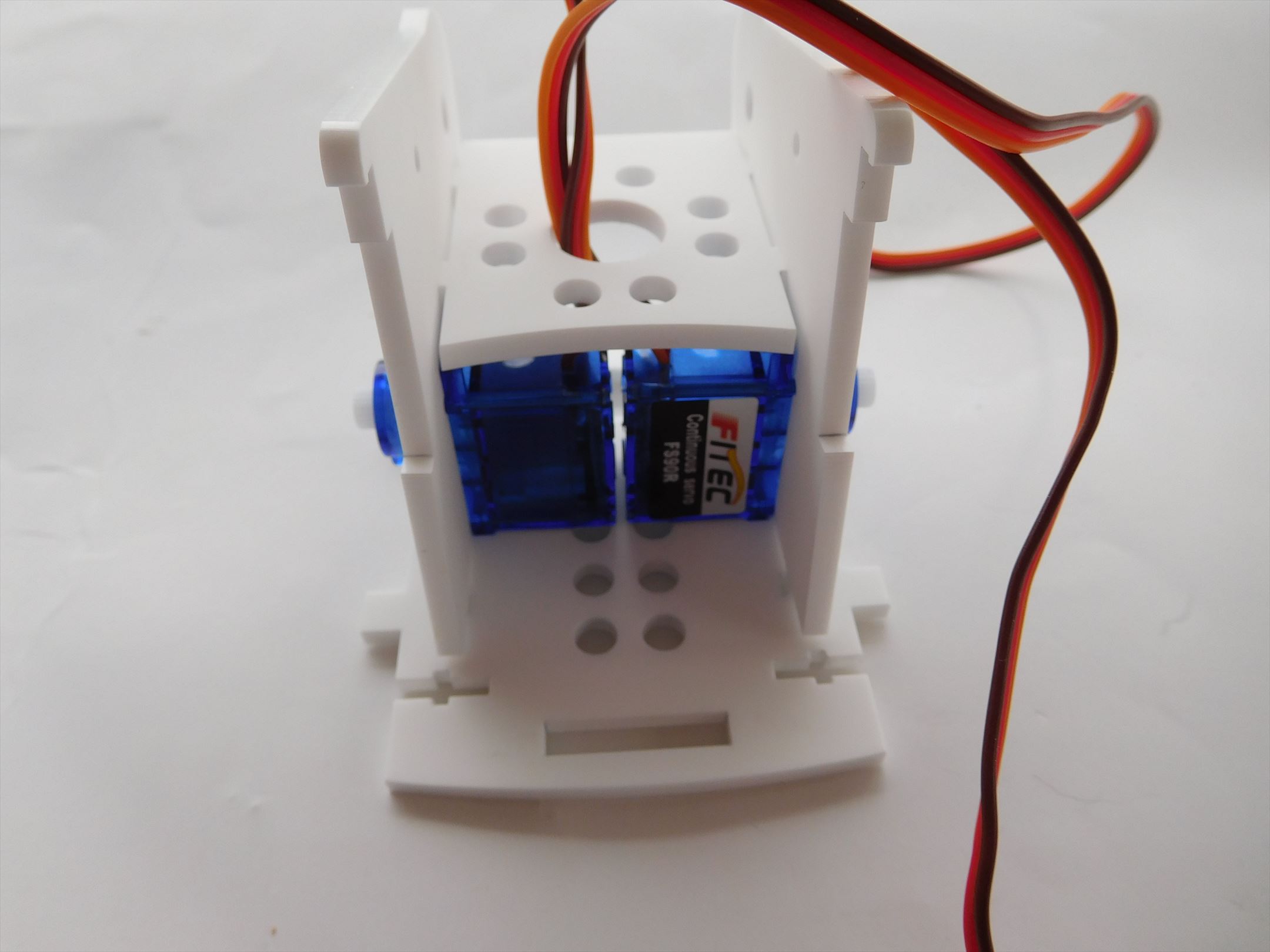
サーボを取り付ける↓
底板にサーボフランジ部がちょうど嵌め込まれるスリットが空いているのでそこに差し込む。
ネジ、接着剤などの固定は不要で、ただ差し込むだけ。
側板の取りつけ↓
側板を取り付けますが、底板のスリットに差し込む前にネジのナット部を側板のスリットに嵌め込む。

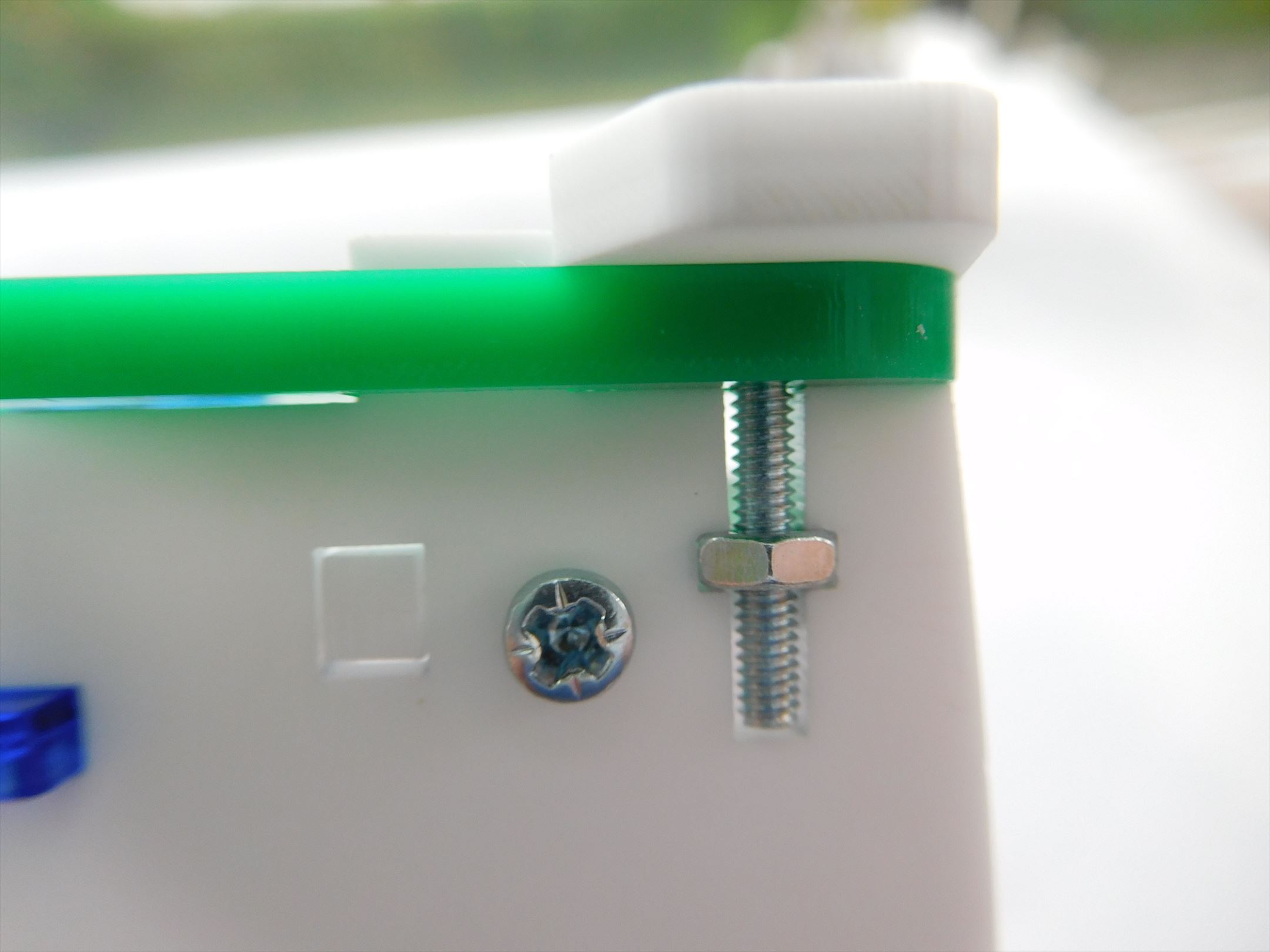
ネジを絞める↓
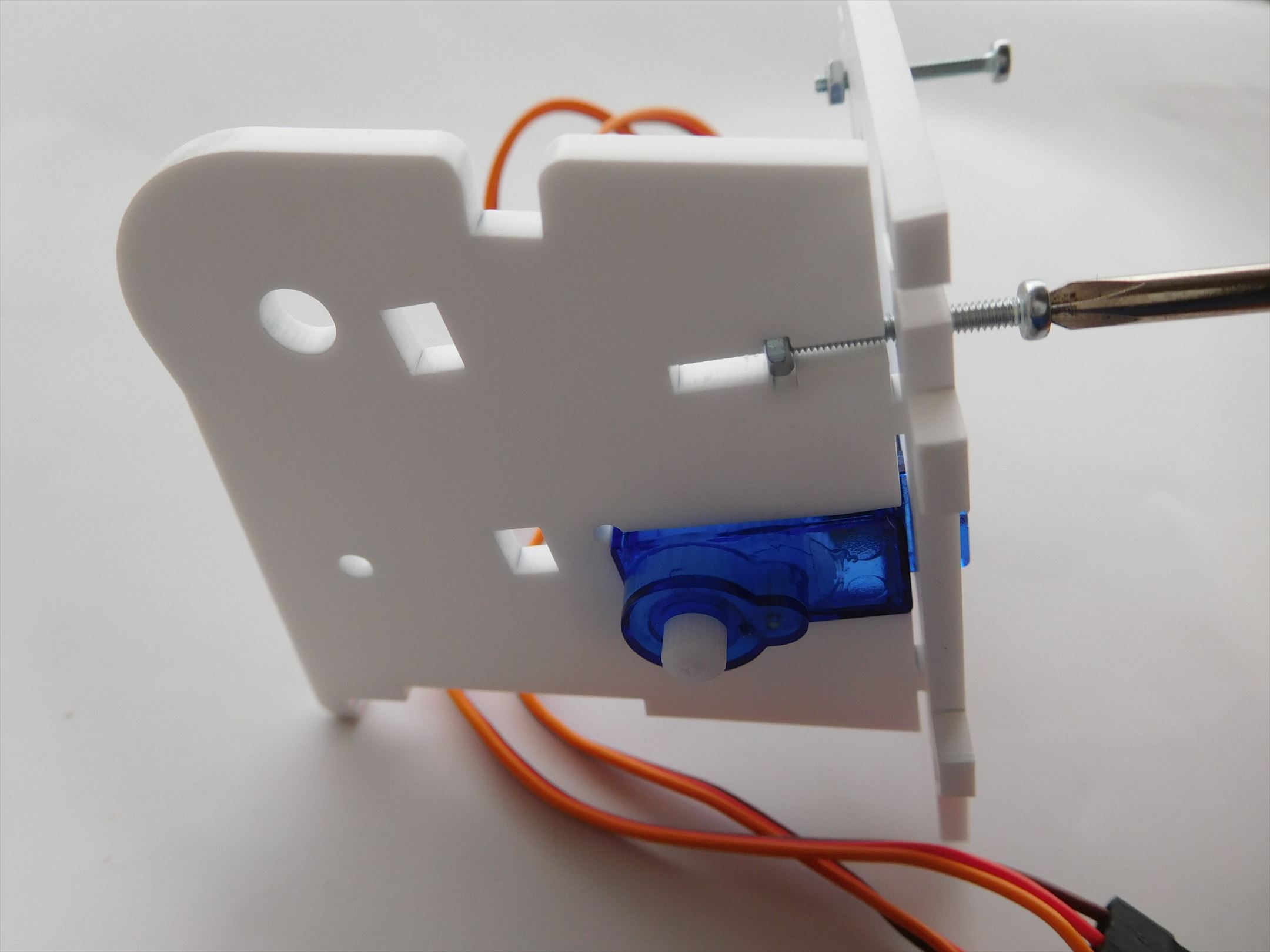
ネジを締めた状態↓

反対側の側板を取り付ける↓
天板を取り付ける↓
スリットに嵌め込むだけで、特にネジ締め箇所は無い。

更に側板を取りつける↓
この側板にもネジを前もって付けておきナットも嵌め込んでおく。ナットの位置はネジの先端部に留めておく。


ナットをスリットに嵌め込む↓
ちょっとコツが要るがネット(2か所)を底板のスリットに嵌め込みます。

ネジを絞めこむ↓


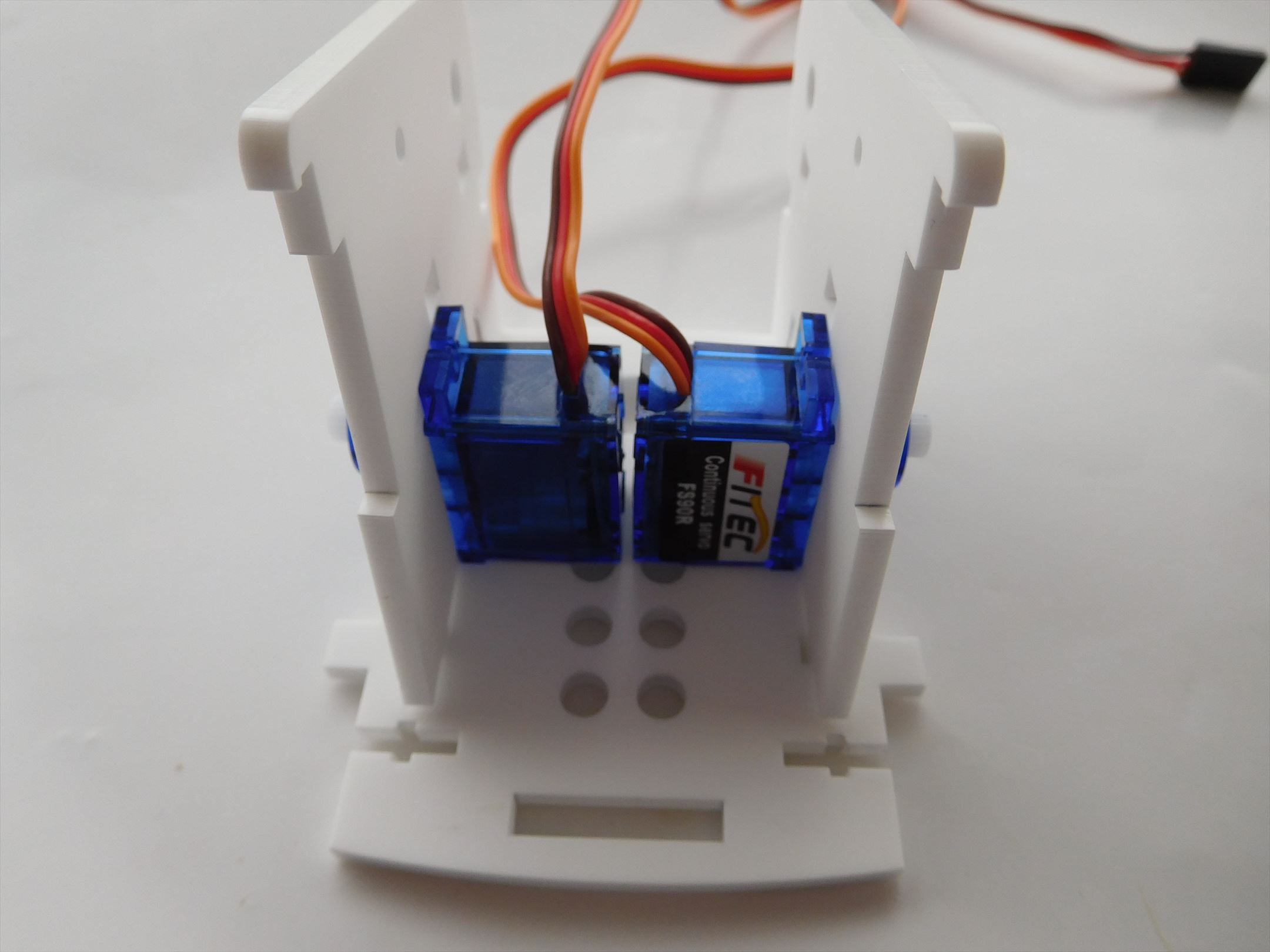
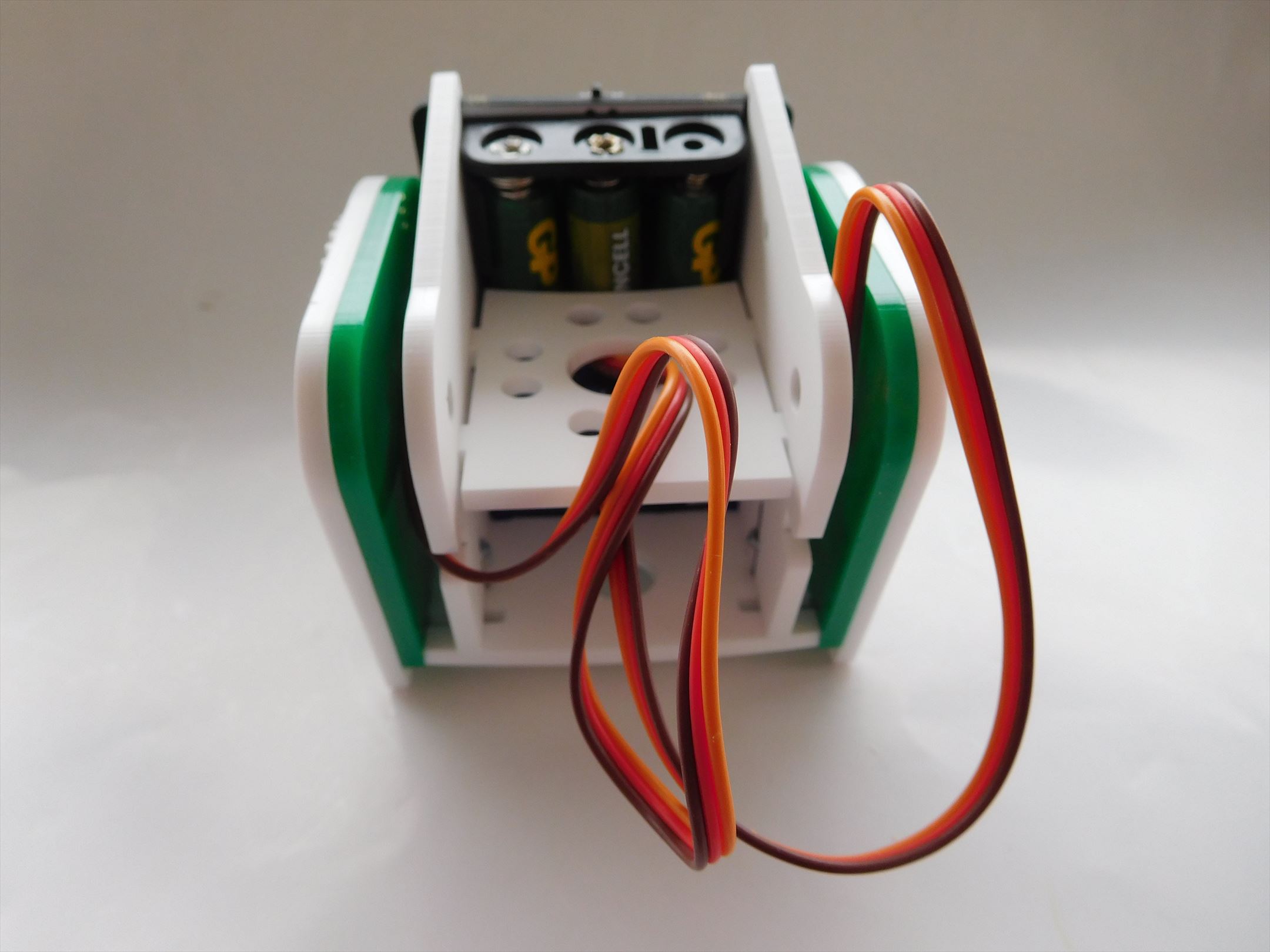
サーボモーター接続↓
下の画像の様にコネクタの向き(リード線の色を合わせる)に注意して2個のサーボモータの接続を行う。

microbit+ServoLiteボードの組み付け↓
ボード上部をボディ上部の詰めに引っ掛けて全面から押す。ネジ締めは不要。

T型パネルの取り付け↓
下の画像にあるT型のパネルと底板のスリットに差し込み組み付ける。

ここまで完成↓

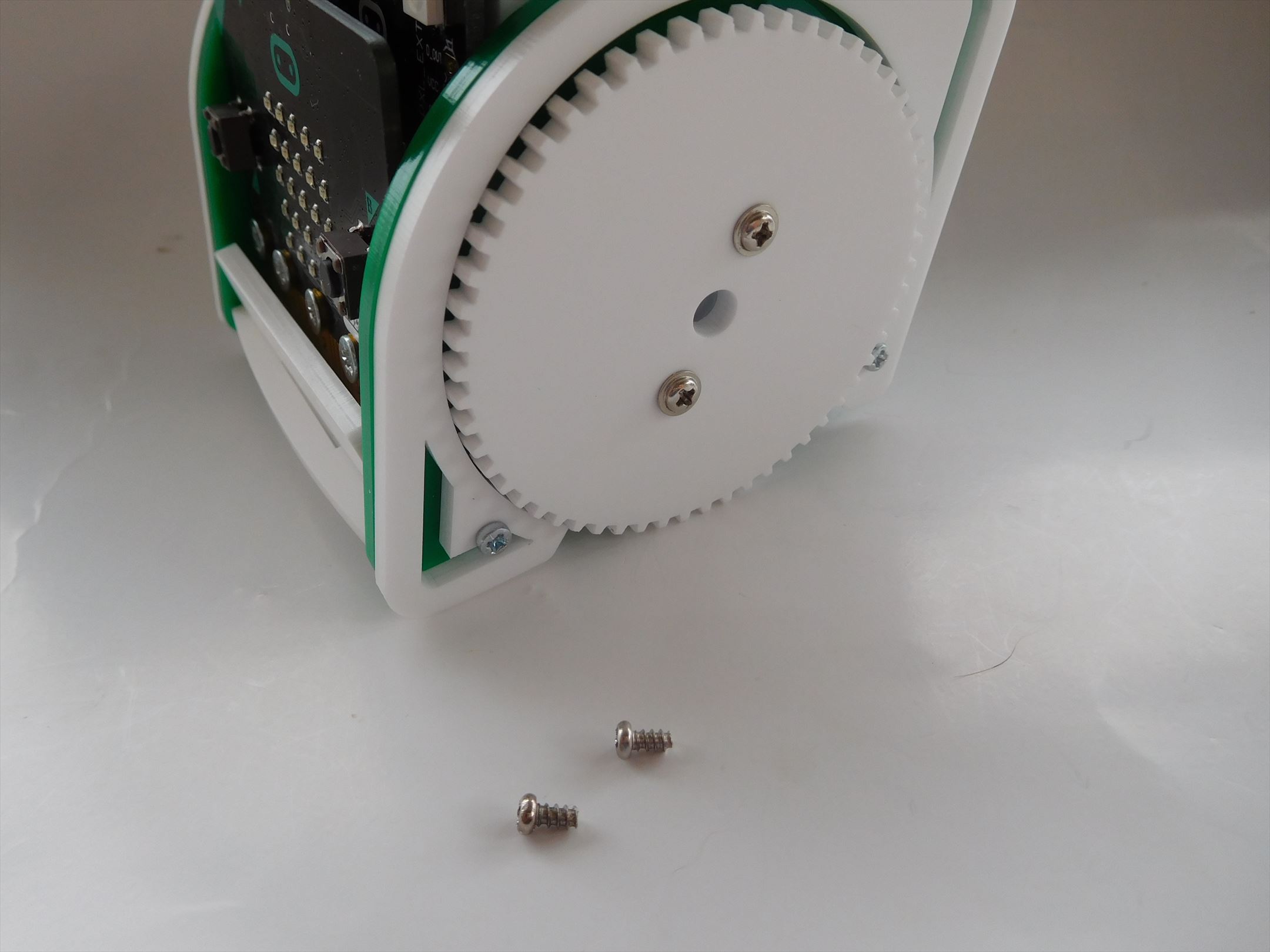
車輪を取り付ける↓
ネジを使い車輪をサーボモータ軸に固定する

完成!!!↓



これで完成です。
次はプログラム編に進みます。
![]()
![[micro:bit]OLED(有機EL)で表示を読みやすく](https://umek.topaz.ne.jp/mameduino/wp-content/uploads/2019/07/DSCN3745_R-150x150.jpg "[micro:bit]OLED(有機EL)で表示を読みやすく")

