
MOVE miniカスタムブロックを使う[プログラム編②]
Kitronik社からリリースされているMOVE mini用のカスタムブロックを使ってみましたので簡単に説明をします。
MOVE miniの車輪駆動には360°サーボモータが使われていて車輪を回転させるには「サーボ出力する・・・」ブロックを使い角度指定することで前進・後退させてます。それに対しMOVE mini用のカスタムブロックであれば直接的に駆動させる「前進」、「後退」のブロックが使えるのでより簡単にプログラミングができます。
目 次
1.MOVE mini用カスタムブロックの追加
①「高度なブロック」を開き、最下部にある「パッケージを追加する」をクリックする。

②キーワード「Kitornik」で検索する。
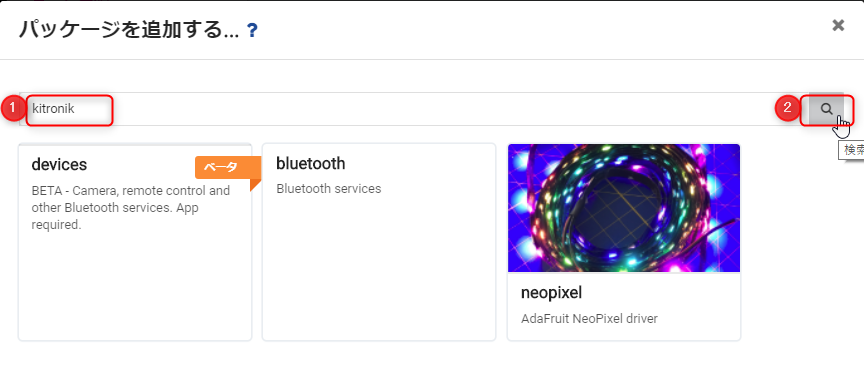
③Kitronik-servo-liteを選択

④「Servo-Lite]カスタムブロックが追加される。
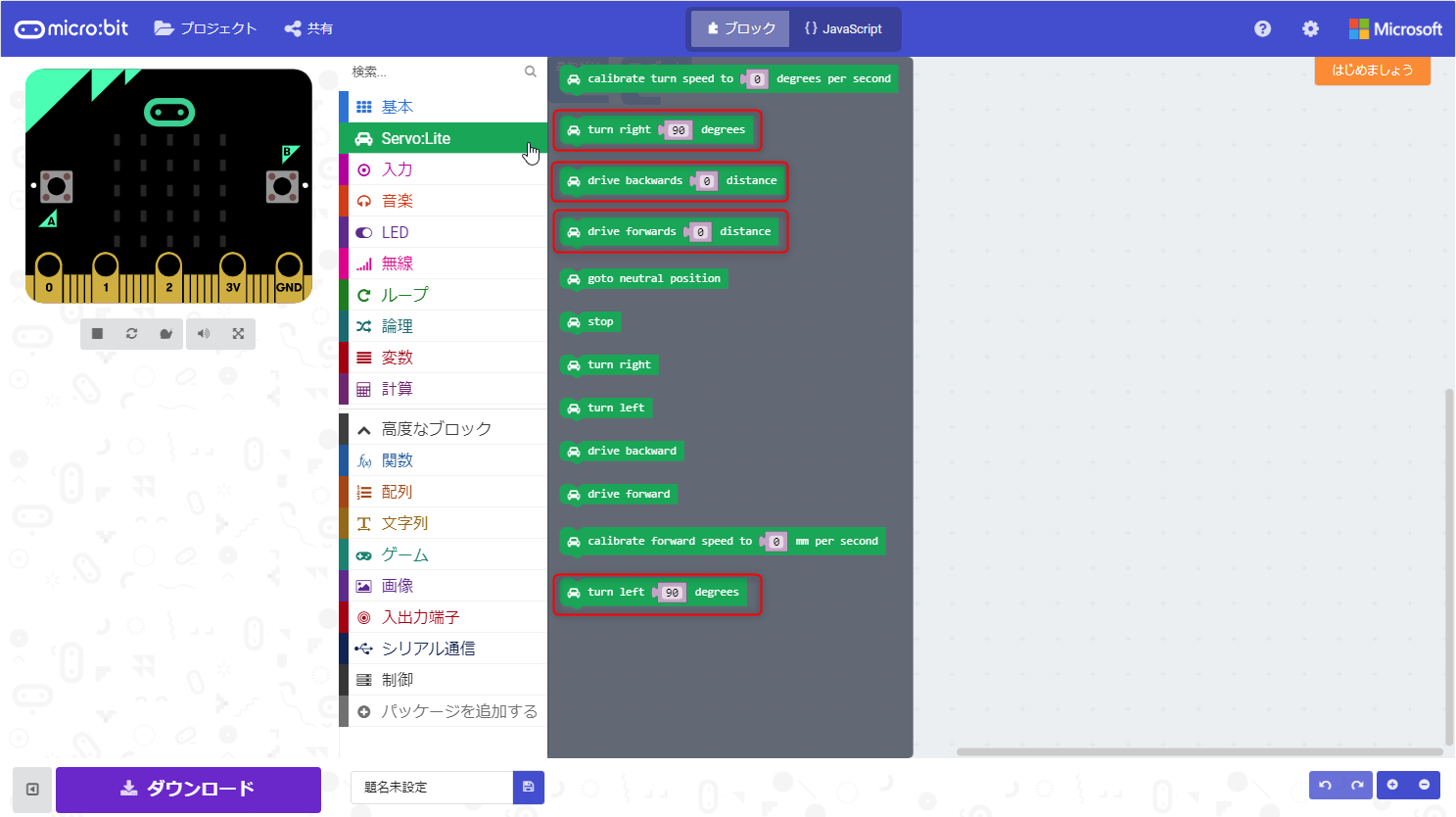
Servo-Liteグループ内に計12個のブロックが追加されます。

2.距離・角度のキャリブレーション
各ブロックの中で、下図の4個(赤枠)のブロックは値の設定が可能であるがこれらブロックを使用するには距離・角度のキャリブレーションが必要です。
①キャリブレーション用プログラムの実行
下図のプログラムを実行させる、
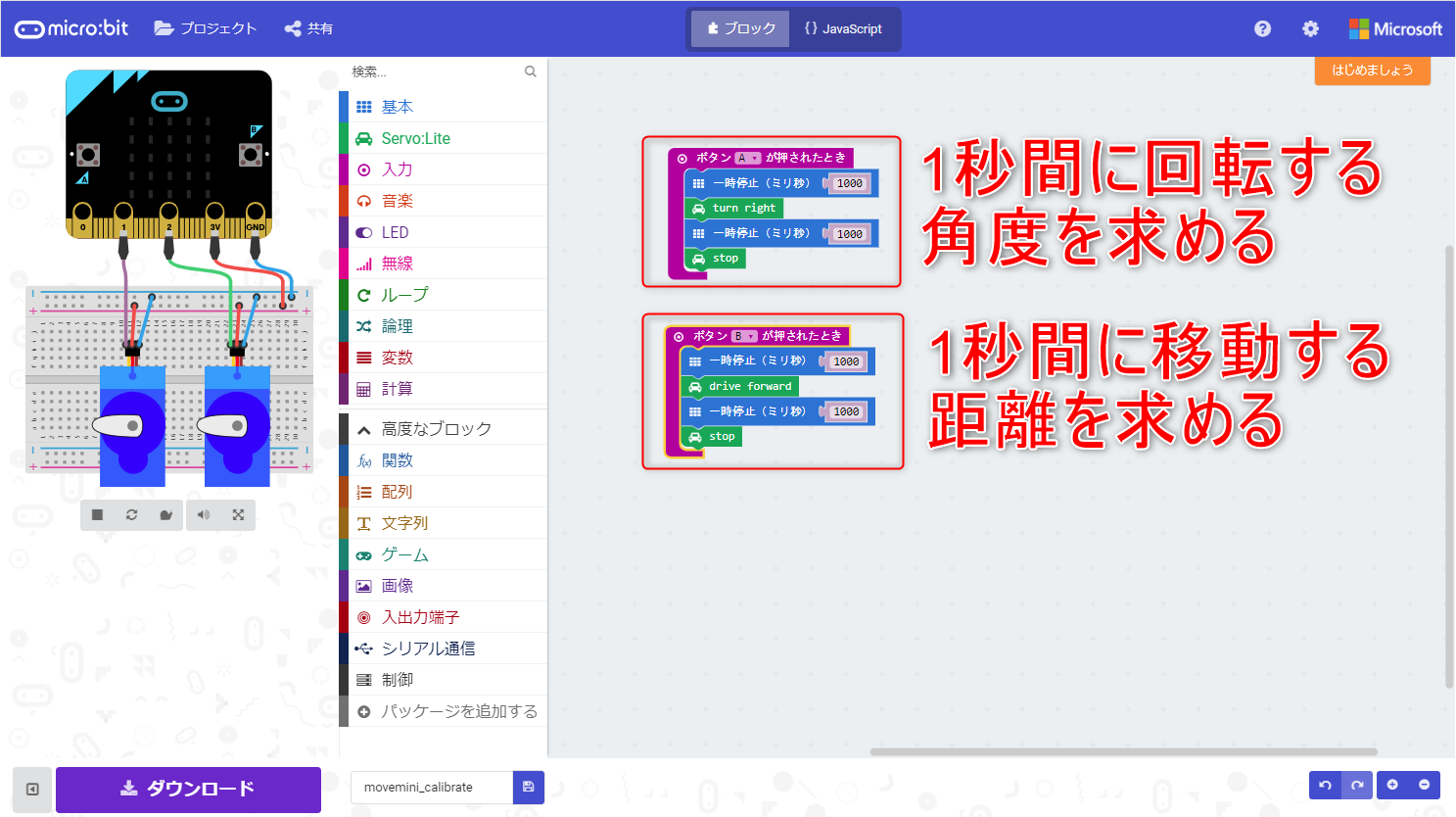
Aボタンを押す:1秒間右回転するのでこの時の回転角度を求める。
⇒ 実測値は315度
Bボタンを押す:1秒間前進するのでこの時の移動距離を求める。
実測値は200mm。
②キャリブレーション値を代入&実走行
最初だけブロックでキャリブレーション値代入&実行を囲む。

![]()
![[micro:bit]OLED(有機EL)で表示を読みやすく](https://umek.topaz.ne.jp/mameduino/wp-content/uploads/2019/07/DSCN3745_R-150x150.jpg "[micro:bit]OLED(有機EL)で表示を読みやすく")

